Kinetic Energy vs Velocity PhysicsWhy Kinetic Energy Scales as v²
Introduction
Kinetic energy is the energy an object possesses by virtue of its motion. The formula KE = ½mv² encodes two independent relationships: kinetic energy is proportional to mass, and proportional to the square of velocity. Those two words, linear and quadratic, describe a profound asymmetry in how the two variables matter, and that asymmetry has consequences in every domain from vehicle safety to sports biomechanics to reactor engineering.
This relationship opens the study of energy and work because it establishes the energy cost of motion before any transformation (potential, thermal, or chemical) is introduced. Every energy-conservation argument downstream begins with KE = ½mv², and every work-energy theorem calculation ends by evaluating it. Understanding the quadratic dependence on velocity is prerequisite to understanding why braking distances do not simply double when speed doubles, why a pitched baseball carries far more energy than its modest mass suggests, and why small increases in wind speed deliver disproportionately large increases in turbine output.
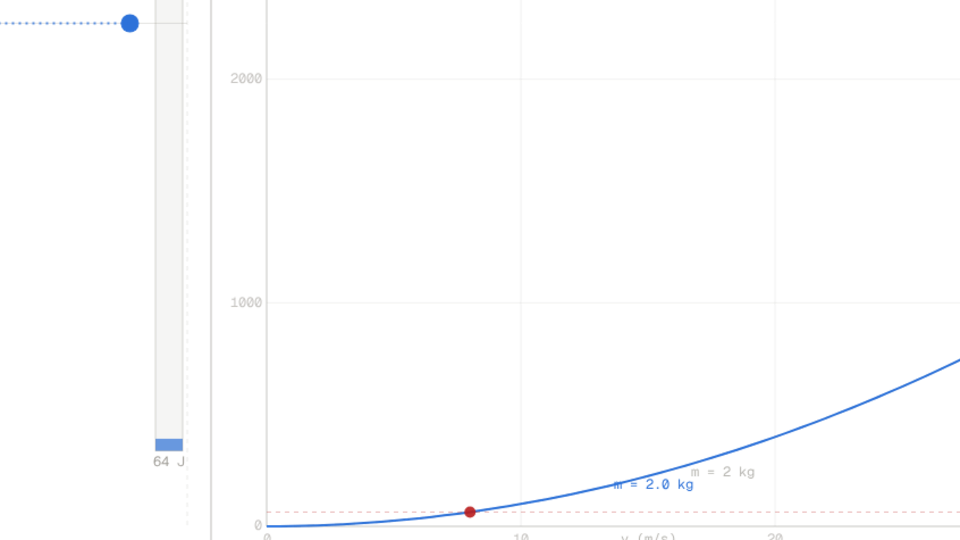
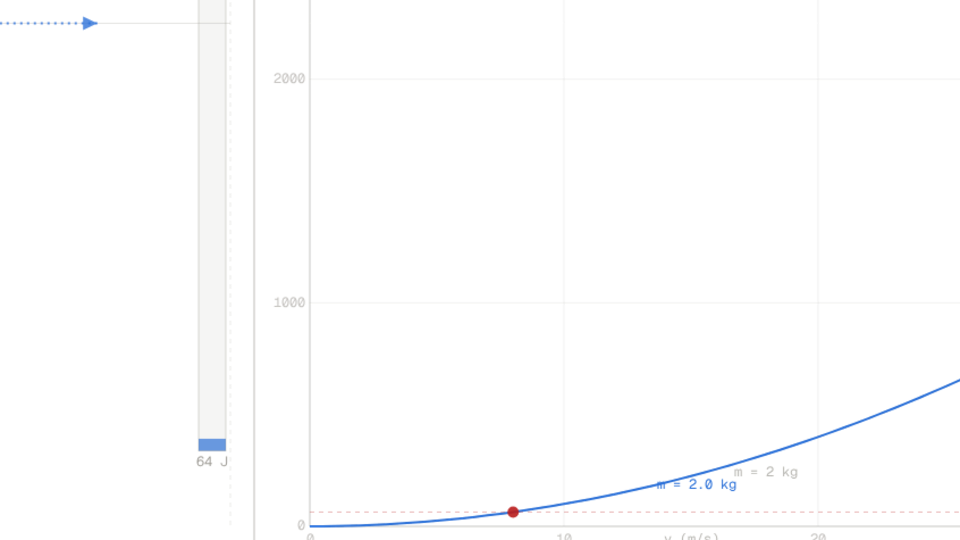
Intuition insists that doubling speed and doubling mass should have the same effect on kinetic energy. The readouts settle the question: with m = 2.0 kg and v = 8.0 m/s, the KE readout shows 64.0 J. Doubling the Mass slider to 4.0 kg raises the readout to 128.0 J, a factor of two. Returning mass to 2.0 kg and doubling the Speed slider to 16.0 m/s raises the readout to 256.0 J, a factor of four. The live dot on the parabola graph makes the difference visible at a glance.
The Physics Explained
The kinetic energy formula KE = ½mv² follows from integrating Newton's second law (F = ma) over a displacement. When a constant net force accelerates a mass m from rest to speed v across distance d, the work done equals F·d = ma·d. Using the kinematic relation v² = 2ad, substituting gives work = ½mv². The result is independent of how long the acceleration took or what path was followed; only the final speed and the mass enter. This derivation also shows why KE is always non-negative: v² cannot be negative regardless of direction, so the sign of velocity is irrelevant to the energy content.
The quadratic dependence on velocity is the central physical fact of this topic. The simulator makes it concrete: setting m = 2.0 kg and sweeping the Speed slider from 10 m/s to 20 m/s moves the KE readout from 100 J to 400 J, a factor of four for a factor of two in speed. The KE ratio readout (labelled "KE ratio (v×2)") confirms 4.00 at any speed above 0.01 m/s, because the ratio KE(2v)/KE(v) = ½m(2v)² / ½mv² = 4 regardless of mass. Mass cancels entirely from the ratio, which means the quadratic character of the velocity dependence is a universal feature of kinetic energy, not a property of any particular object.
The linear dependence on mass is equally real but less dramatic. With the Speed slider fixed at 8.0 m/s, moving the Mass slider from 2.0 kg to 4.0 kg doubles the KE readout from 64.0 J to 128.0 J. Moving it from 2.0 kg to 10.0 kg quintuples the readout to 320.0 J. The live parabola curve shifts upward uniformly as mass increases (the entire curve scales by the mass ratio) but its shape, a parabola, does not change. The dashed reference curve at m = 2.0 kg stays fixed so the scaling effect of mass is always visible against a fixed baseline.
At the slider extremes, m = 10.0 kg and v = 30.0 m/s, KE = ½ × 10 × 900 = 4500 J. The simulator's KE bar reaches its ceiling at this value: bar height represents 100% of the encoded KE_MAX = 4500 J. Reducing speed to 15.0 m/s while keeping mass at 10.0 kg drops the bar to 1125 J, exactly one quarter, reproducing the quadratic ratio in the vertical bar display as directly as on the parabola graph.
Key Equations
At the initial slider positions m = 2.0 kg and v = 8.0 m/s: KE = ½ × 2.0 × 8.0² = ½ × 2.0 × 64 = 64.0 J. The simulator's KE readout shows 64.0 J and the live dot on the parabola graph sits at the coordinate (8, 64). This is the baseline against which all mass and speed changes are measured.
With m = 2.0 kg and v = 10.0 m/s: KE = 100 J. With v = 20.0 m/s: KE = 400 J. The ratio is 400 / 100 = 4.00, matching the KE ratio readout in the simulator exactly. Mass does not appear in this ratio; doubling speed quadruples kinetic energy for any object regardless of how heavy it is.
With v = 8.0 m/s and m = 2.0 kg: KE = 64.0 J. With m = 4.0 kg: KE = ½ × 4.0 × 64 = 128.0 J. The ratio is exactly 2: doubling mass doubles kinetic energy. The simulator's KE readout steps from 64.0 J to 128.0 J when the Mass slider moves from 2.0 to 4.0 kg at fixed speed, confirming the linear relationship.
Accelerating the 2.0 kg ball from rest (v₀ = 0) to v = 8.0 m/s requires net work W = 64.0 − 0 = 64.0 J. Accelerating it further to v = 16.0 m/s requires an additional W = ½ × 2.0 × 256 − 64.0 = 256.0 − 64.0 = 192.0 J, three times the original 64.0 J just to cover the second factor-of-two speed increment. The quadratic growth of KE means equal speed increments require ever-larger energy investments.
Key Variables
| Symbol | Name | Unit | Meaning |
|---|---|---|---|
| m | Mass | kg | Inertial mass of the moving object; adjustable from 0.5 to 10 kg |
| v | Speed | m/s | Magnitude of velocity; adjustable from 0 to 30 m/s |
| KE | Kinetic energy | J | Energy of motion; equals ½mv²; shown by the bar and the live dot on the graph |
| W | Work | J | Net energy transferred to the object; equals the change in kinetic energy |
| v₀ | Initial speed | m/s | Speed before a work input; used in the work-energy theorem ΔKE = ½mv² − ½mv₀² |
Real World Examples
Why do highway speed limits have such a large effect on crash severity?
A vehicle's kinetic energy scales as the square of its speed, so the energy a crash must absorb grows far faster than the speed itself. A car travelling at 30 m/s carries four times the kinetic energy of the same car at 15 m/s, not twice. That energy must be absorbed by crumple zones, airbags, and the occupants' bodies, structures whose capacity is roughly fixed regardless of how fast the car was going.
The quadratic relationship means that modest increases in speed impose disproportionately larger energy loads on safety systems. Road safety engineers who model crash energy routinely work with KE = ½mv² rather than with momentum alone, because it is kinetic energy that the passive restraint system must dissipate between the moment of first contact and the moment the vehicle stops. Reducing a speed limit from 110 km/h to 90 km/h reduces crash energy by roughly 33%, not the 18% that a linear thinker would expect.
The simulator confirms this directly: with m = 2.0 kg and the Speed slider moved from 15.0 m/s to 30.0 m/s, the KE readout climbs from 225 J to 900 J, exactly a factor of four, while the live dot on the parabola graph visibly jumps to a position four times as high on the vertical axis.
Why does a heavier hammer not quadruple the damage when you swing it twice as hard?
Doubling hammer mass doubles kinetic energy, because the mass term in KE = ½mv² enters linearly. Doubling swing speed quadruples kinetic energy, because velocity enters as a square. An experienced carpenter who wants to drive nails faster therefore benefits more from increasing swing speed than from switching to a heavier hammer; speed is the dominant lever at any given mass.
This distinction is visible in the simulator. Setting m = 2.0 kg and v = 8.0 m/s gives KE = 64.0 J. Doubling mass to 4.0 kg at the same speed raises the KE readout to 128.0 J, a factor of two. Keeping mass at 2.0 kg and doubling speed to 16.0 m/s raises the KE readout to 256.0 J, a factor of four. The live parabola curve shifts upward uniformly when mass increases, confirming the linear scaling, but the curvature, the rate of growth with speed, remains governed entirely by the quadratic exponent on v.
Tool designers exploit this asymmetry in the opposite direction when safety matters more than power. A lighter striking tool swung at the same speed as a heavier one delivers half the energy, reducing the injury risk if the tool slips, a consideration that directly enters the mass range of surgical mallets, demolition hammers used in confined spaces, and automotive assembly torque tools.
How does kinetic energy scaling affect the design of vehicle braking systems?
Brakes convert kinetic energy into heat through friction at the rotor surface. Because KE grows as the square of speed, the heat that must be dissipated in a full-emergency stop from 120 km/h is four times the heat from a stop at 60 km/h, not twice. Brake engineers size rotor thermal mass and ventilation ducts to handle this worst-case energy load, which scales with v² rather than with v.
The mass dependence is linear, so a vehicle that is twice as heavy requires rotors with twice the thermal capacity at the same speed. But a vehicle travelling twice as fast requires rotors with four times the capacity. This is why high-speed rail braking systems and aircraft rejected-takeoff braking systems are engineered to entirely different energy budgets than road vehicles, even when the vehicle masses are comparable.
With m = 10.0 kg and v = 30.0 m/s, the simulator's KE bar reaches its ceiling at 4500 J, the worst-case energy load encoded in the simulation. Reducing speed to 15.0 m/s while keeping mass at 10.0 kg drops the KE readout to 1125 J, a factor-of-four reduction consistent with the quadratic law and directly visible as the bar falling to one quarter of its maximum height.
Further Reading
- Pendulum energy bars: kinetic and potential energy exchange in a swinging pendulum, with energy bar readouts that show KE reaching its maximum exactly at the lowest point of the swing.
- Elastic collision: how kinetic energy is conserved alongside momentum during a perfectly elastic impact, and the closed-form velocity formulas that follow from both conservation laws simultaneously.
- Spring-mass system: the continuous conversion between kinetic and elastic potential energy in an oscillating spring, where KE = ½mv² peaks each time the mass passes through equilibrium.
- Inelastic collision: what happens when momentum is conserved but kinetic energy is not, and where the missing energy goes inside the colliding bodies.