Péndulo doble · SimuladorCaos de dos brazos acoplados
Dos péndulos conectados exhibiendo movimiento caótico bajo la gravedad: pequeñas diferencias en los ángulos iniciales producen trayectorias radicalmente distintas.
Publicado: 22 de abril de 2026 · Actualizado: 28 de mayo de 2026
Objetivo
Investigar el caos determinista en un péndulo doble observando cómo dos brazos no lineales acoplados evolucionan desde el reposo. Verificar que la energía mecánica total se conserva mediante el integrador RK4 a lo largo de la corrida de 30 segundos, y confirmar que cambios arbitrariamente pequeños en los ángulos iniciales producen trayectorias que divergen exponencialmente en el tiempo. El sistema no admite solución cerrada, así que el objetivo es una caracterización cualitativa más que una predicción exacta.
Configuración
- Confirma que el deslizador Brazo 1 marca 1,0 m y que el deslizador Brazo 2 marca 1,0 m, de modo que ambas varillas sean iguales y el sistema tenga su geometría por defecto.
- Coloca el deslizador Ángulo 1 en 120° y el deslizador Ángulo 2 en 60°. Estos son los ángulos de liberación por defecto, medidos desde la vertical inferior.
- Anota el indicador de Energía antes de pulsar Iniciar. Con θ₁ = 120°, θ₂ = 60°, m₁ = m₂ = 1 kg y g ≈ 9,81 m/s², la energía en reposo es de aproximadamente 4,91 J.
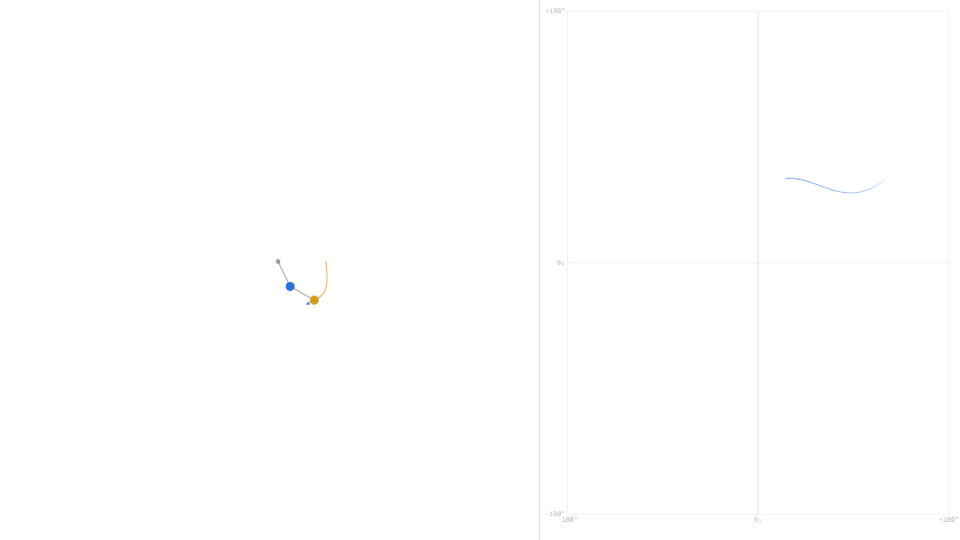
- Pulsa Iniciar y observa cómo el indicador de Tiempo avanza desde 0,00 s. La lenteja inferior comienza de inmediato a trazar un camino caótico sobre el lienzo.
- Deja que la corrida continúe hasta que el Tiempo alcance 30,00 s, el tope estricto que impone MAX_TIME. Registra el indicador de Energía al final y compáralo con el valor del paso 3.
- Pulsa Reiniciar, cambia el Ángulo 1 de 120° a 121°, deja todos los demás controles sin modificar y pulsa Iniciar de nuevo para comparar con la primera corrida.
Predicción analítica
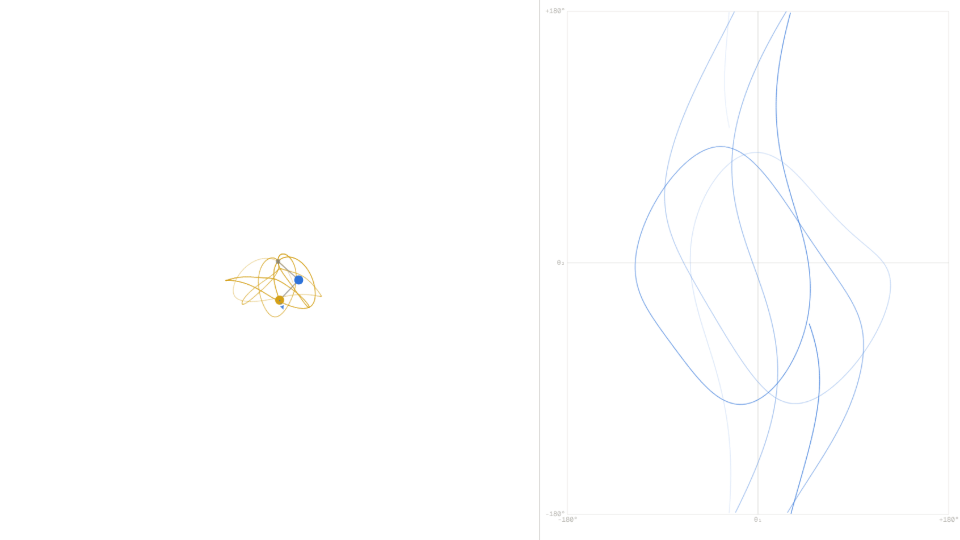
El péndulo doble no tiene una trayectoria en forma cerrada. El procedimiento de Euler−Lagrange produce dos ecuaciones diferenciales acopladas, no lineales y de segundo orden en θ₁ y θ₂ que no admiten solución analítica; el simulador las integra numéricamente con RK4 a un subpaso de 1/240 de segundo. Lo que el sistema sí admite es un exponente de Lyapunov positivo λ, así que dos trayectorias cuyos ángulos iniciales difieren en δ(0) se separan aproximadamente como |δ(t)| ≈ |δ(0)|·exp(λ·t). Para un péndulo doble a amplitud moderada, como θ₁ = 120° y θ₂ = 60°, λ se sitúa en el rango de aproximadamente 1 a 3 segundos inversos, así que un desfase inicial de 1° crecerá hasta el orden de 10° en aproximadamente 1 a 3 segundos y se saturará al tamaño del sistema poco después. El simulador lo demuestra de forma directa: la primera corrida con θ₁ = 120° y la segunda con θ₁ = 121° producen un movimiento visualmente idéntico durante un breve intervalo y luego divergen tan completamente que los dos rastros no comparten ningún rasgo reconocible al final. La única magnitud que debería seguir siendo predecible es la energía mecánica total, que la dinámica lagrangiana conserva de manera exacta:
El indicador de Energía debería mantener cerca de 4,91 J durante toda la corrida.
Análisis de resultados
Cuando termine la corrida de 30 segundos, examina juntos los indicadores de Tiempo y de Energía. El indicador de Tiempo mostrará 30,00 s, y el de Energía debería seguir cerca de su valor inicial de 4,91 J. Cualquier pequeña deriva (quizá unas pocas centésimas de joule) proviene de la integración numérica con paso finito y no de la física real, ya que la mecánica lagrangiana conserva la energía mecánica total de forma exacta en ausencia de disipación. Ahora compara las dos corridas con θ₁ = 120° y θ₁ = 121°. El rastro de la segunda lenteja difiere en todo el lienzo; ningún tramo de una corrida se superpone con el de la otra. Esta es la firma cualitativa de un exponente de Lyapunov positivo. El simulador demuestra que el determinismo, en el sentido de ecuaciones de movimiento idénticas, no implica predictibilidad cuando las condiciones iniciales solo se conocen con precisión finita. Las dos corridas se generaron con exactamente las mismas ecuaciones integradas por exactamente el mismo algoritmo y, sin embargo, un cambio de 1° en una entrada produjo dos trayectorias sin relación. Los valores de energía, en cambio, coinciden dentro del ruido numérico en ambas corridas.
Fuente de error
Lo que esta simulación NO modela: la distribución de masa de los brazos (las bolas son puntos, los brazos son varillas rígidas sin masa), la fricción en los pivotes, la resistencia del aire, la rigidez finita de los brazos ni amortiguamiento interno alguno. La formulación lagrangiana es exacta bajo estas idealizaciones. **Caso especial (caos):** como las perturbaciones diminutas del estado inicial divergen exponencialmente, hasta la pequeña deriva numérica del integrador se amplifica en trayectorias visiblemente distintas a tiempos largos: el estado predicho a un instante específico tardío no es significativo, solo el carácter caótico cualitativo lo es. La brecha restante entre una magnitud predicha a corto plazo y las lecturas es por tanto puramente numérica, no física.
Exploración adicional
- Coloca Brazo 1 en 0,5 m y deja Brazo 2 en 1,0 m, luego devuelve ambos ángulos a 120° y 60°. ¿Cómo cambia una distribución asimétrica de masa el indicador de Energía en reposo, y con qué rapidez comienza el rastro de la lenteja inferior a llenar el lienzo en comparación con el caso simétrico?
- Reduce el Ángulo 1 a 5° y el Ángulo 2 a 5°. En este régimen de pequeños ángulos los términos no lineales se vuelven despreciables. ¿El rastro de la segunda lenteja se ve caótico o se asienta en el patrón regular esperado de dos osciladores lineales acoplados cerca de sus modos normales?
- Ejecuta una vez la configuración por defecto, luego reinicia y vuelve a ejecutar con el Ángulo 2 cambiado de 60° a 61°. ¿Después de cuántos segundos, juzgados desde el indicador de Tiempo, los dos rastros se vuelven visualmente distinguibles, y qué implica ese intervalo sobre el exponente de Lyapunov λ?
- Coloca ambos brazos en 2,0 m y ambos ángulos iniciales en 180°, los valores máximos permitidos. El sistema parte invertido y en equilibrio. ¿El indicador de Energía se mantiene constante una vez que comienza el movimiento, y el rastro se ve cualitativamente distinto del caso por defecto de 120°, 60°?
- Con la geometría por defecto, observa con atención el indicador de Energía a lo largo de toda la corrida de 30 segundos. ¿Deriva hacia arriba, hacia abajo o se mantiene plano? Cualquiera que sea la dirección de la deriva, ¿qué te dice eso sobre si RK4 introduce un sesgo sistemático de energía o solo ruido aleatorio de redondeo?
- Coloca Brazo 1 en 1,0 m, Brazo 2 en 0,5 m, Ángulo 1 en 90° y Ángulo 2 en 0°. El brazo inferior parte colgando recto hacia abajo desde un brazo superior horizontal. Predice con palabras cómo se moverá el brazo inferior en el primer segundo y compara con lo que produce el simulador.