Péndulo doble · FísicaCaos determinista y divergencia de Lyapunov
Introducción
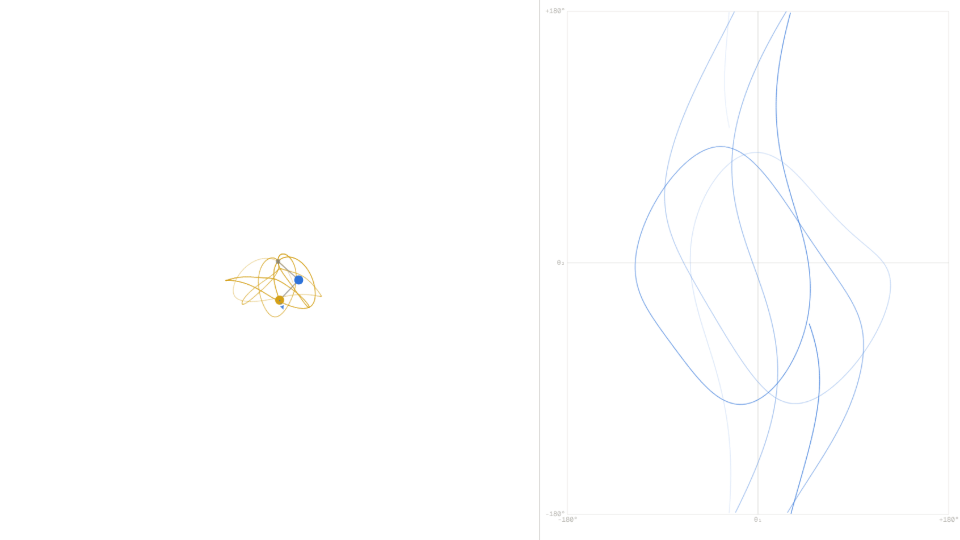
Un péndulo doble es un segundo brazo de péndulo colgado de la lenteja de un primero, ambos balanceándose desde un único pivote fijo bajo la sola acción de la gravedad. El simulador corre esa geometría con brazos de longitud L₁ = 1,0 m y L₂ = 1,0 m, lentejas puntuales de masa m₁ = m₂ = 1 kg, y un tope estricto de 30 segundos en el indicador de Tiempo. Liberado desde θ₁ = 120° y θ₂ = 60° medidos desde la vertical inferior, la lenteja inferior empieza de inmediato a trazar una maraña de bucles sobre el lienzo que nunca se repite y nunca se asienta en un ritmo reconocible.
El sistema importa porque es el montaje mecánico más simple en el que ecuaciones deterministas producen un movimiento que nadie puede predecir en detalle. La mecánica lagrangiana escribe dos ecuaciones diferenciales acopladas, no lineales y de segundo orden para θ₁ y θ₂; esas ecuaciones no tienen solución cerrada y deben integrarse numéricamente. El péndulo doble se convirtió en la demostración estándar del caos en la física clásica, y la misma plantilla de osciladores no lineales acoplados reaparece en robótica, biomecánica y modelado meteorológico.
Es tentador suponer que el simulador debe estar usando números aleatorios en alguna parte, porque dos corridas con ángulos iniciales casi iguales divergen tan rápido. El simulador lo desmiente: las ecuaciones son completamente deterministas, el integrador es un esquema Runge-Kutta de cuarto orden sin ruido, y el indicador de Energía se mantiene cerca de 4,91 J durante los 30 s completos, confirmando que no se inyecta nada estocástico, el caos está integrado en las ecuaciones mismas.
La física explicada
Cada brazo aporta un grado de libertad (su ángulo desde la vertical inferior) así que el estado completo del sistema es el vector (θ₁, θ₂, θ₁', θ₂'). La mecánica lagrangiana deriva las ecuaciones de movimiento a partir de una sola función escalar, la lagrangiana L = KE − PE. Con m₁ = m₂ = 1 kg, L₁ = L₂ = 1,0 m y g ≈ 9,81 m/s², al sustituir las expresiones cinética y potencial en el procedimiento de Euler-Lagrange se obtienen dos EDO acopladas de segundo orden que mezclan θ₁'' y θ₂'' a través de términos cos(θ₁ − θ₂). El simulador las resuelve como un sistema de primer orden de cuatro dimensiones usando RK4 con un subpaso de 1/240 de segundo.
La no linealidad tiene dos fuentes. Primero, la gravedad aporta términos sin(θ) en lugar de la aproximación lineal θ que convierte un péndulo simple en una sinusoide limpia. Segundo, el acoplamiento mismo es no lineal: los factores cos(θ₁ − θ₂) y sin(θ₁ − θ₂) hacen que el efecto del brazo superior sobre el inferior dependa de su orientación relativa de una forma que no puede reducirse a un coeficiente constante tipo resorte. En la liberación por defecto de θ₁ = 120° y θ₂ = 60°, ambos efectos son grandes, y la trayectoria que traza la lenteja inferior llena una región aproximadamente anular del lienzo en lugar de repetir una curva cerrada.
La energía es la única magnitud que se mantiene predecible. Con θ₁ = 120°, θ₂ = 60°, y el sistema liberado desde el reposo, la energía cinética es cero y la energía potencial es de aproximadamente 4,91 J relativa al punto más bajo de las lentejas, que es exactamente lo que muestra el indicador de Energía en t = 0,00 s. Como la gravedad es la única fuerza y no hay amortiguamiento, la energía mecánica total se conserva exactamente bajo el flujo lagrangiano; el paso RK4 del simulador la preserva al nivel del ruido numérico. Después de la corrida de 30 segundos, el indicador de Energía sigue cerca de 4,91 J, derivando como mucho unas pocas centésimas de joule.
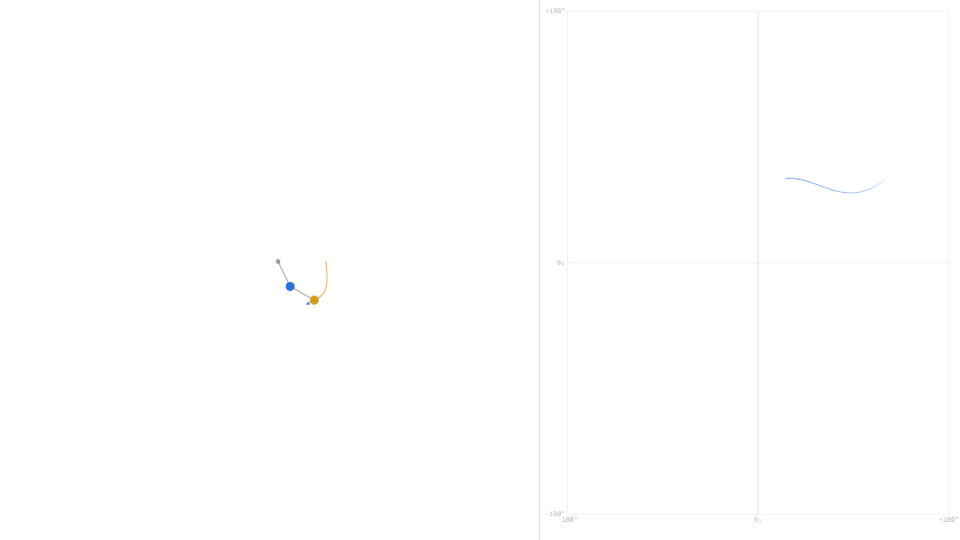
Lo que hace caótico al sistema es el exponente de Lyapunov positivo λ. Dos trayectorias cuyos ángulos iniciales difieren en δ(0) se separan aproximadamente como |δ(t)| ≈ |δ(0)|·exp(λ·t). Para esta configuración λ se sitúa en el rango de aproximadamente 1 a 3 segundos inversos, así que un desfase de 1° crece al orden de 10° en pocos segundos y se satura al tamaño del sistema poco después. Reiniciar el simulador, cambiar el Ángulo 1 de 120° a 121° dejando los demás deslizadores intactos, y comparar contra la primera corrida produce dos rastros visualmente idénticos durante el primer segundo aproximadamente y sin ningún rasgo reconocible compartido al final de la ventana de 30 segundos.
Ecuaciones clave
En t = 0,00 s el simulador se libera desde el reposo, así que θ₁' = θ₂' = 0 y toda la expresión de KE evalúa a cero. El indicador de Energía refleja por tanto solo el término potencial al inicio, sin contribución cinética alguna.
Para m₁ = m₂ = 1 kg, L₁ = L₂ = 1,0 m, g ≈ 9,81 m/s², θ₁ = 120°, θ₂ = 60°: PE = −(2)·9,81·1,0·cos(120°) − 1·9,81·1,0·cos(60°) = −19,62·(−0,5) − 9,81·0,5 = 9,81 − 4,91 ≈ 4,91 J relativa a la referencia del punto más bajo. El indicador de Energía muestra 4,91 J antes de pulsar Iniciar, coincidiendo con este cálculo de manera exacta.
La mecánica lagrangiana conserva la energía mecánica total de manera exacta cuando las únicas fuerzas son conservativas, que es el caso aquí. Tras correr la configuración por defecto durante los 30 s completos, el indicador de Energía sigue mostrando un valor dentro de unas pocas centésimas de joule del valor inicial de 4,91 J, con la pequeña deriva proveniente enteramente de la integración numérica de paso finito y no de la física real.
Para esta configuración λ es de aproximadamente 1 a 3 s⁻¹. Con δ(0) = 1° (la diferencia entre θ₁ = 120° y θ₁ = 121°), la separación predicha en t = 5 s queda entre 1°·e⁵ ≈ 148° y 1°·e¹⁵, órdenes de magnitud mayor que el tamaño del sistema, lo que simplemente significa que el límite se satura. El simulador lo confirma: los rastros de la lenteja inferior de las dos corridas no comparten ningún rasgo reconocible más allá de los primeros segundos.
Variables clave
| Símbolo | Nombre | Unidad | Significado |
|---|---|---|---|
| θ₁ | Ángulo del brazo superior | rad | Ángulo del brazo superior desde la vertical inferior |
| θ₂ | Ángulo del brazo inferior | rad | Ángulo del brazo inferior desde la vertical inferior |
| θ₁' | Velocidad angular superior | rad/s | Tasa de cambio del ángulo del brazo superior |
| θ₂' | Velocidad angular inferior | rad/s | Tasa de cambio del ángulo del brazo inferior |
| m₁, m₂ | Masas de las lentejas | kg | Masas puntuales en los extremos de los brazos superior e inferior |
| L₁, L₂ | Longitudes de los brazos | m | Longitudes de las varillas rígidas sin masa superior e inferior |
| g | Aceleración gravitatoria | m/s² | 9,81 m/s² hacia abajo en la superficie terrestre |
| E | Energía mecánica total | J | Suma de energía cinética y potencial; se conserva |
| λ | Exponente de Lyapunov | 1/s | Tasa a la que divergen las trayectorias cercanas |
Ejemplos del mundo real
¿Por qué el momento de soltar de un gimnasta importa tanto en la barra fija?
Un gimnasta balanceándose en la barra fija y soltando para hacer un mortal se comporta aproximadamente como un péndulo doble forzado: el torso del cuerpo forma un brazo, las piernas y la cadera forman el otro, y las manos en la barra actúan como pivote. Como el sistema está en un régimen caótico una vez que la amplitud del balanceo es grande, el ángulo del cuerpo en cualquier instante futuro depende de manera sensible de los ángulos articulares en el momento de soltar. Los entrenadores entrenan el momento de soltar al milisegundo porque un retraso de incluso unas pocas centésimas de segundo cambia la cuenta de rotación en una fracción medible.
El simulador cuantifica lo que «sensible» significa aquí. Con la geometría por defecto de L₁ = 1,0 m, L₂ = 1,0 m y ángulos θ₁ = 120°, θ₂ = 60°, un cambio de 1° en el Ángulo 1 produce rastros visualmente idénticos durante el primer segundo y sin estructura reconocible compartida cuando el indicador de Tiempo alcanza 30,00 s. La tolerancia temporal de un gimnasta es la análoga de ese desfase de 1°, y el exponente de Lyapunov λ ≈ 1 a 3 s⁻¹ que rige el simulador es del mismo orden de magnitud que la tasa de divergencia que limita cuán repetible puede ser una rutina.
¿Cuán precisa puede ser realmente una previsión meteorológica de largo plazo?
La atmósfera es mucho más compleja que un péndulo doble, pero comparte la misma propiedad estructural: un conjunto pequeño de ecuaciones diferenciales no lineales cuyas soluciones exhiben exponentes de Lyapunov positivos. El artículo de Edward Lorenz de 1963 sobre el modelo del clima hizo explícita esta conexión, y la cifra moderna de aproximadamente dos semanas como horizonte práctico de predictibilidad para la atmósfera global proviene del mismo escalamiento exp(λ·t) que controla el péndulo doble, solo que con un λ mucho menor del orden de 1 cada pocos días en lugar de 1 por segundo.
El simulador da una sensación práctica de lo que ese escalamiento implica. Manteniendo la configuración por defecto con brazos de 1,0 m y ángulos de 120° y 60°, el indicador de Energía se mantiene dentro de centésimas de joule de 4,91 J durante toda la corrida de 30 segundos, así que no se está añadiendo nada estocástico, y aun así un retoque de 1° al Ángulo 1 produce un rastro de la lenteja inferior totalmente distinto. Los modelos meteorológicos se comportan igual: las ecuaciones son exactamente conocidas, la masa y la energía totales se conservan, pero el estado inicial se mide con precisión finita y esa precisión finita establece un techo duro al horizonte de pronóstico.
¿Por qué los brazos robóticos de dos eslabones necesitan software de control tan elaborado?
Un brazo robótico de dos segmentos con articulaciones rotatorias en el hombro y el codo es geométricamente un péndulo doble. Sin control activo, la dinámica libre del brazo es caótica a cualquier amplitud de trabajo significativa, así que el controlador no puede operar como un planificador hacia adelante; debe cerrar un lazo de retroalimentación lo bastante rápido como para suprimir la divergencia entre el estado articular real y la trayectoria planeada antes de que el error impulsado por Lyapunov se acumule. Por eso los controladores industriales corren a tasas de actualización de kilohercios y por eso sus pilas de software incluyen sistemas operativos de tiempo real.
El simulador ilustra el comportamiento de lazo abierto en el peor caso que el controlador tiene que combatir. Con L₁ = 1,0 m, L₂ = 1,0 m y el sistema liberado desde θ₁ = 120° y θ₂ = 60°, el rastro de la lenteja inferior en t = 30,00 s cubre una región aproximadamente anular del lienzo sin estructura repetitiva. Un controlador funcionando una vez por segundo ya estaría perdido bajo esta dinámica, ya que λ ≈ 1 a 3 s⁻¹ amplifica cualquier error sin corregir por un factor de e a e³ entre actualizaciones. La tasa de kilohercios lleva el factor de crecimiento por actualización cerca de uno, que es precisamente lo que hace factible el control por retroalimentación.
Lecturas adicionales
- Masa con resorte: el oscilador canónico de un grado de libertad cuya linealidad hace su movimiento exactamente predecible, en contraste con el sistema caótico de dos grados de libertad de aquí.