Fricción en un plano inclinado · FísicaÁngulo crítico tan θ = μs
Introducción
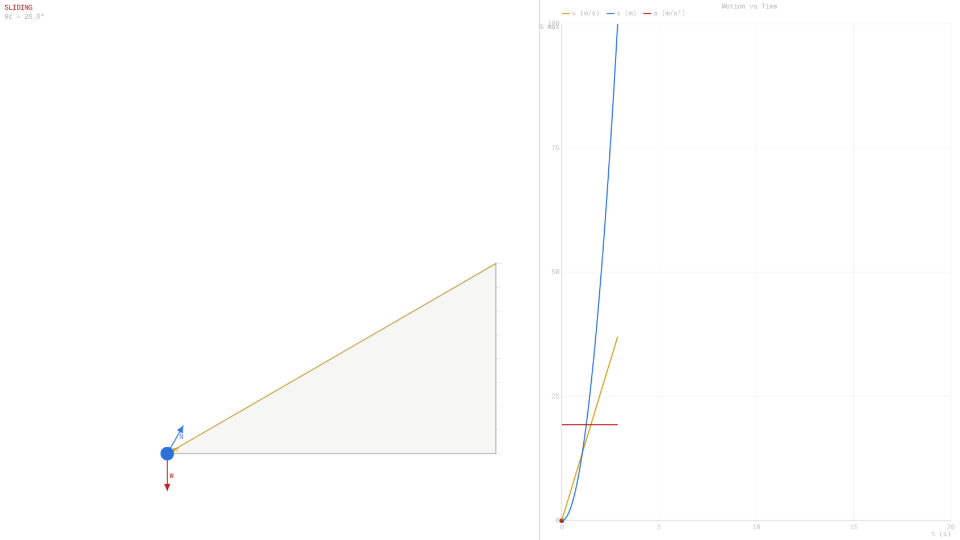
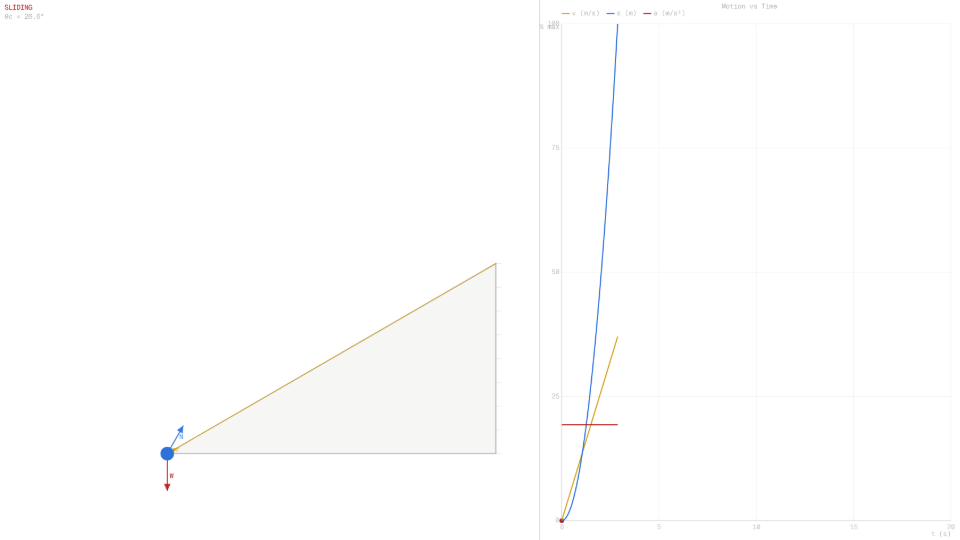
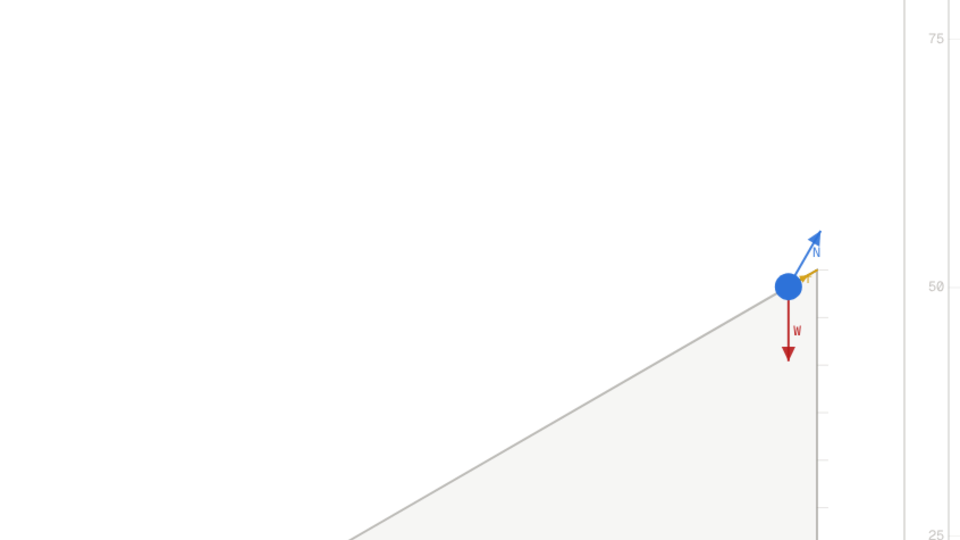
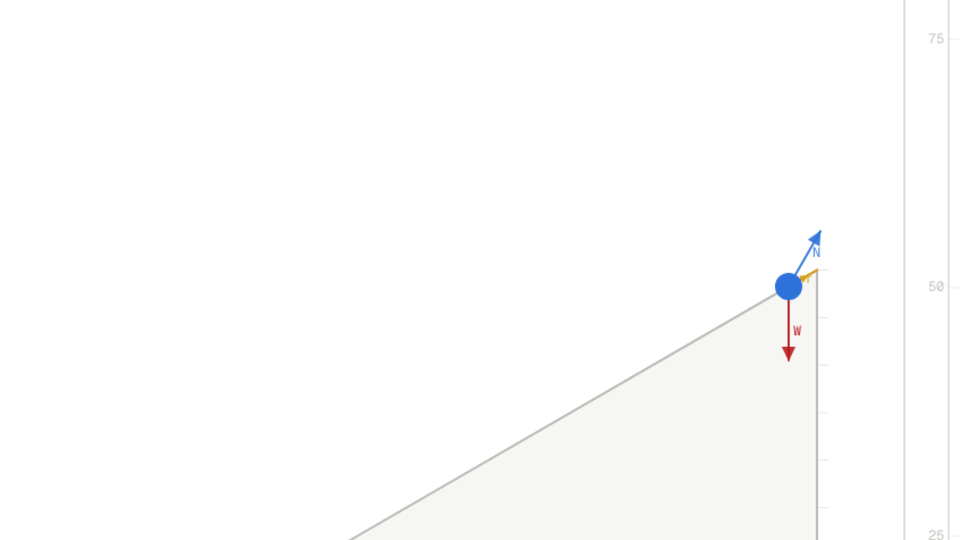
La fricción en un plano inclinado describe lo que ocurre cuando un bloque reposa sobre una superficie inclinada: dos fuerzas de fricción compiten con la componente de la gravedad que jala el bloque hacia abajo por la rampa. La fricción estática mantiene el bloque en su lugar hasta un valor máximo determinado por las propiedades de la superficie; más allá de ese límite el bloque comienza a deslizarse, y la fricción cinética (siempre menor) gobierna la aceleración resultante. El simulador captura las tres fuerzas como flechas vectoriales etiquetadas (peso en carmesí, normal en azul celeste, fricción en ámbar) y registra la velocidad en una gráfica en tiempo real, de modo que cada régimen es directamente observable.
El tema aparece en todo curso introductorio de física porque vincula la segunda ley de Newton con una geometría concreta y ajustable. Los ingenieros aplican las mismas relaciones para diseñar cintas transportadoras, estacionamientos en pendiente, pistas de esquí y muros de contención. Los modelos geotécnicos de riesgo de deslizamiento de tierra se reducen a la misma condición de deslizamiento. Comprender el ángulo crítico (la inclinación a la que el bloque justo empieza a moverse) es, por lo tanto, la puerta de entrada a una amplia gama de problemas aplicados.
Suele pensarse que un bloque más pesado debería deslizarse a un ángulo menor que uno más ligero, porque la gravedad lo jala con más fuerza. El simulador contradice esa idea: con θ = 30°, μs = 0,50 y cualquier valor de masa, la condición de deslizamiento tan θ = μs no cambia. La masa se cancela en ambos lados del balance de fuerzas, así que el ángulo crítico θc = arctan(μs) ≈ 26,6° es independiente del peso del bloque.
La física explicada
Cuando un bloque reposa sobre un plano inclinado sin fricción a un ángulo θ, la gravedad mg actúa verticalmente hacia abajo. Descomponiendo esa fuerza en dos ejes alineados con la superficie se obtienen las dos componentes relevantes: mg·sin θ jala el bloque pendiente abajo, y mg·cos θ lo presiona contra la superficie. La superficie responde con una fuerza normal N = mg·cos θ dirigida perpendicularmente al plano. La fricción estática actúa pendiente arriba y puede tomar cualquier valor desde cero hasta μs·N = μs·mg·cos θ. El bloque permanece estático mientras mg·sin θ ≤ μs·mg·cos θ, lo que se simplifica a tan θ ≤ μs. El indicador θc del simulador muestra arctan(μs) de forma continua, de modo que la diferencia entre el ángulo actual y el umbral de deslizamiento siempre es visible.
Con los deslizadores en los valores predeterminados (θ = 30°, μs = 0,50, μk = 0,35) el simulador informa inmediatamente DESLIZANDO porque tan 30° ≈ 0,577 supera μs = 0,50. Una vez que comienza el deslizamiento, la fricción cinética reemplaza a la estática. Su magnitud es fk = μk·mg·cos θ = 0,35·mg·cos 30°, que es menor que el valor estático máximo. Aplicando la segunda ley de Newton a lo largo del plano se obtiene una fuerza neta de mg·sin θ − fk = mg·(sin 30° − 0,35·cos 30°). Dividiendo por la masa se obtiene la aceleración a = g·(sin θ − μk·cos θ). Con g = 9,81 m/s², esto evalúa a 9,81·(0,500 − 0,303) ≈ 1,93 m/s², lo que coincide con el indicador de Aceleración en el momento en que la simulación arranca.
Cambiar a una configuración estática (θ = 20°, μs = 0,50) demuestra el otro régimen. Aquí tan 20° ≈ 0,364 está muy por debajo de μs = 0,50, por lo que la fricción solo necesita suministrar 0,364·mg·cos 20° para equilibrar la gravedad a lo largo del plano. La fricción estática se ajusta automáticamente a exactamente ese valor; el bloque no se mueve y el indicador de aceleración permanece en 0,00 m/s². La simulación se detiene automáticamente después de tres segundos en estado estático continuo, confirmando que no hay movimiento. La flecha ámbar de fricción en el lienzo se encoge o crece con la demanda estática actual, haciendo visible este ajuste automático.
El coeficiente de fricción cinética μk no puede superar a μs; el simulador limita μk a μs (el máximo del deslizador μk sigue a μs) para que el ordenamiento físico μk ≤ μs nunca se viole independientemente de las posiciones de los deslizadores. Esta restricción refleja la observación real de que, una vez que comienza el deslizamiento, se necesita menos fuerza para mantener el bloque en movimiento que para iniciarlo, la gráfica de Velocidad vs Tiempo muestra al bloque acelerando sin interrupciones una vez que el régimen estático termina.
Ecuaciones clave
La superficie debe empujar perpendicularmente a sí misma con exactamente la fuerza necesaria para impedir que el bloque se hunda. Con los valores predeterminados m = 2,0 kg, θ = 30°, g = 9,81 m/s²: N = 2,0·9,81·cos 30° = 2,0·9,81·0,866 = 16,99 N. Esta es la fuerza que escala tanto el límite de fricción estática como la magnitud de la fricción cinética.
La masa se cancela en ambos lados de mg·sin θ = μs·mg·cos θ, dejando la relación adimensional tan θ = μs como umbral. Con μs = 0,50, el ángulo crítico es θc = arctan(0,50) ≈ 26,6°. El indicador θc del simulador lo confirma: a θ = 26° el bloque permanece ESTÁTICO; a θ = 27° el estado cambia a DESLIZANDO, lo que es coherente con la fórmula de arctan dentro de la resolución de 1° del deslizador.
Una vez que el deslizamiento ha comenzado, la fricción se fija en este valor independientemente de la velocidad. Con los valores predeterminados: fk = 0,35·2,0·9,81·cos 30° = 0,35·16,99 = 5,95 N. Esta fuerza actúa pendiente arriba, oponiéndose al movimiento hacia abajo.
Dividir la fuerza neta a lo largo del plano por la masa produce este resultado, del que la masa también se ha cancelado. Con θ = 30° y μk = 0,35: a = 9,81·(sin 30° − 0,35·cos 30°) = 9,81·(0,500 − 0,303) = 9,81·0,197 ≈ 1,93 m/s². El indicador de Aceleración del simulador muestra 1,93 m/s² en t = 0, y la gráfica de Velocidad vs Tiempo sube linealmente desde cero con esa pendiente hasta que el bloque alcanza el fondo de la rampa de 8 m a aproximadamente t = 2,88 s.
Variables clave
| Símbolo | Nombre | Unidad | Significado |
|---|---|---|---|
| θ | Ángulo de inclinación | ° | Inclinación de la rampa medida desde la horizontal |
| μs | Coeficiente de fricción estática | (adimensional) | Relación entre la fricción estática máxima y la fuerza normal; determina el ángulo crítico |
| μk | Coeficiente de fricción cinética | (adimensional) | Relación entre la fricción cinética y la fuerza normal durante el deslizamiento; siempre menor que μs |
| N | Fuerza normal | N | Fuerza de contacto perpendicular a la superficie del plano; igual a mg·cos θ |
| a | Aceleración | m/s² | Aceleración neta a lo largo del plano una vez que comienza el deslizamiento; cero en el régimen estático |
| θc | Ángulo crítico | ° | Menor ángulo al que ocurre el deslizamiento; igual a arctan(μs) |
Ejemplos del mundo real
¿Por qué los ingenieros inclinan las cintas transportadoras en ángulos específicos?
El diseño de cintas transportadoras exige mantener los materiales sueltos estáticos respecto a la superficie de la cinta mientras esta se mueve. Si la cinta se inclina más allá del ángulo crítico θc = arctan(μs) para el material transportado, las partículas comienzan a deslizarse hacia atrás, una falla que atasca el sistema o derrama la carga. Los ingenieros miden el coeficiente de fricción estática entre la cinta y la carga, y fijan el ángulo de inclinación por debajo de arctan(μs).
Para grano sobre caucho, los valores típicos de μs van de 0,55 a 0,70, situando el techo operativo seguro entre unos 29° y 35°. Con μs = 0,50 y θ = 26° en el simulador, el indicador θc confirma θc = arctan(0,50) ≈ 26,6°, y la etiqueta de estado se mantiene en ESTÁTICO porque 26° está por debajo de ese umbral. Subir el deslizador de ángulo a 27° cambia el estado a DESLIZANDO, demostrando con exactitud el margen que los ingenieros cuidan en los diseños reales.
¿Cómo fijan los ingenieros automotrices el límite de pendiente para autos estacionados en colinas?
Un auto estacionado en una colina depende de la fricción estática entre el neumático y el asfalto (complementada por el freno de mano) para resistir el deslizamiento. El límite de fricción pura sin el freno lo rige tan θ = μs: para una interfaz asfalto seco–caucho, μs ≈ 0,70, lo que da un ángulo crítico cercano a 35°. El pavimento mojado reduce μs hasta 0,40, llevando θc a unos 22°. Los códigos municipales de estacionamiento en ciudades con colinas suelen limitar las pendientes permitidas a 17°–20°, manteniéndose por debajo del umbral en pavimento mojado.
El simulador hace concreta esa sensibilidad a la pendiente: con μs = 0,40 y el deslizador de ángulo en 21°, el bloque permanece ESTÁTICO; al subir el ángulo a 22° se activa el estado DESLIZANDO y el indicador de Aceleración salta a a = g·(sin 22° − 0,30·cos 22°) ≈ 0,94 m/s² usando μk = 0,30, coincidiendo con la predicción analítica dentro de la precisión mostrada. La flecha ámbar de fricción cinética se acorta visiblemente respecto a la flecha azul celeste de la fuerza normal, reflejando la fricción reducida cuando el bloque ya está en movimiento.
El mismo análisis se aplica a camiones cargados: la masa se cancela en la condición de deslizamiento, por lo que la calificación de fricción de la superficie de rodadura (no el peso del vehículo) es lo que determina el riesgo en pendientes pronunciadas. Los gestores de flotas que operan en terrenos montañosos especifican la clase de fricción de la carretera, no la clase de peso del vehículo, al evaluar el riesgo en pendientes.
¿Cómo usan los geólogos el ángulo de fricción para predecir el riesgo de deslizamientos de tierra?
El análisis de estabilidad de taludes en geotecnia se reduce, en su forma más simple, a la misma condición de deslizamiento que rige el simulador: una capa de suelo se desliza sobre la roca cuando el ángulo de la ladera θ supera arctan(μs) para la interfaz suelo–roca. Los geólogos miden ese ángulo de reposo en el laboratorio y luego comparan los gradientes de la ladera con datos topográficos. Cualquier talud más inclinado que θc se clasifica como condicionalmente inestable.
Una tormenta que lubrica la interfaz y reduce μs de 0,60 a 0,35 desplaza θc de 31° a 19°, desestabilizando potencialmente laderas que antes eran seguras. El simulador ilustra esa sensibilidad de manera directa: con el deslizador de ángulo en 25° y μs reducido de 0,60 a 0,50, el estado permanece en ESTÁTICO (arctan(0,50) ≈ 26,6°, que sigue siendo mayor que 25°); al reducir μs a 0,45, θc baja a 24,2°, que cae por debajo del ángulo actual de 25°, y el estado cambia inmediatamente a DESLIZANDO, el mismo cruce de umbral que precede a los deslizamientos reales.
Una vez que comienza el movimiento, la aceleración a = g·(sin θ − μk·cos θ) determina la rapidez del desplazamiento. Con θ = 25° y μk = 0,28 (un valor representativo para suelo saturado), el indicador de Aceleración del simulador muestra aproximadamente 1,65 m/s², que integrado durante decenas de segundos produce las velocidades observadas en flujos de tierra de movimiento lento. Los deslizamientos más rápidos corresponden a ángulos más pronunciados y valores de μk más bajos, ambos reproducibles con los deslizadores del simulador.
Lecturas adicionales
- Plano inclinado: la línea base de la rampa sin fricción: cómo se comportan la fuerza normal y las componentes gravitacionales antes de introducir la fricción.
- Bloque con fricción: fricción estática y cinética sobre una superficie horizontal, aislando la relación de coeficientes sin la geometría angular.
- Constructor de diagramas de cuerpo libre: construye e inspecciona el diagrama de tres fuerzas (peso, normal, fricción) que sustenta el análisis del plano inclinado.
- Carritos y la tercera ley de Newton: cómo la fuerza de contacto normal en la superficie satisface el par acción–reacción que el problema del plano inclinado utiliza implícitamente.