Resorte amortiguado · FísicaRazón de amortiguamiento y regímenes
Introducción
Un resorte amortiguado describe una masa unida a un resorte mientras una fuerza resistiva proporcional a la velocidad le va quitando energía al movimiento. Sin esa resistencia la masa oscilaría para siempre con amplitud fija; con ella, el movimiento decae como una oscilación que se encoge, regresa suavemente al reposo o se arrastra hacia el equilibrio sin cruzarlo nunca. Un único número adimensional, la razón de amortiguamiento ζ = c / (2·sqrt(m·k)), selecciona entre esos tres regímenes a partir de la misma ecuación de movimiento subyacente.
El modelo es la herramienta de trabajo de todo problema de vibración en ingeniería mecánica y civil. Las suspensiones de carros, los cierres de puertas, los elementos vibrantes de circuitos, las cápsulas de los sismógrafos y los soportes antichoque dentro de un disco duro se reducen a una masa, un resorte y un amortiguador. Una vez que el diseñador fija m y k para el trabajo estructural concreto, la elección del coeficiente de amortiguamiento c es lo que decide si el sistema vibra, se asienta limpiamente o se recupera con pereza.
Sería natural pensar que cualquier amortiguamiento distinto de cero mata la oscilación por completo. La estela en pantalla lo desmiente: con k = 10 N/m, m = 1,0 kg y c = 3,00 N·s/m, la lectura de Razón de amortiguamiento se sitúa en 0,474 y la estela todavía atraviesa varios picos visibles antes de aplanarse, porque ζ tiene que llegar a 1,0 para que la oscilación realmente se detenga.
La física explicada
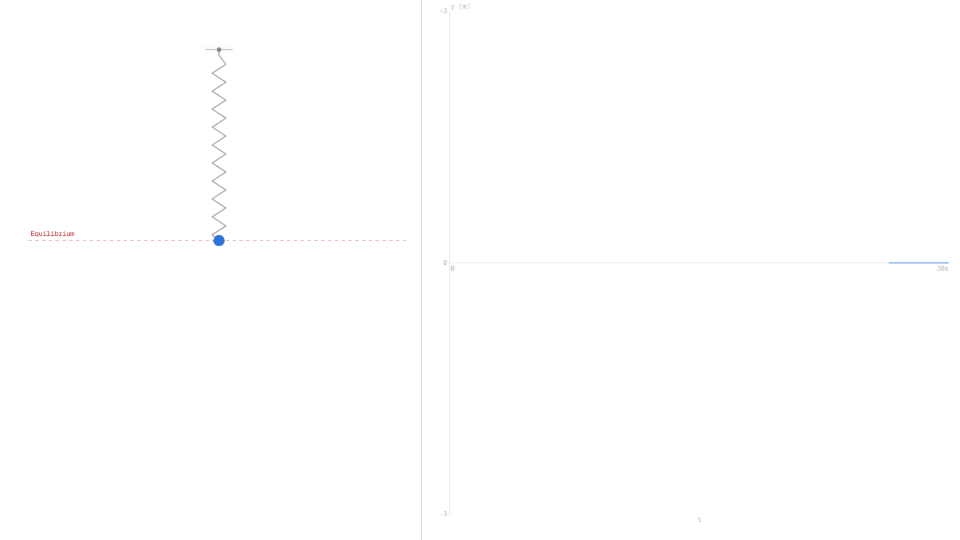
La masa sobre el resorte carga dos fuerzas en este modelo. El resorte aporta una fuerza restauradora −k·x que siempre apunta de vuelta a la línea de equilibrio en x = 0 con magnitud proporcional al desplazamiento, la forma lineal de la ley de Hooke. El amortiguador aporta un arrastre viscoso −c·ẋ que se opone a la dirección en la que se mueve la masa, con magnitud proporcional a la rapidez. La segunda ley de Newton las combina en una única ecuación diferencial lineal de segundo orden, m·ẍ + c·ẋ + k·x = 0, que la simulación integra paso a paso desde las condiciones iniciales fijadas por los deslizadores.
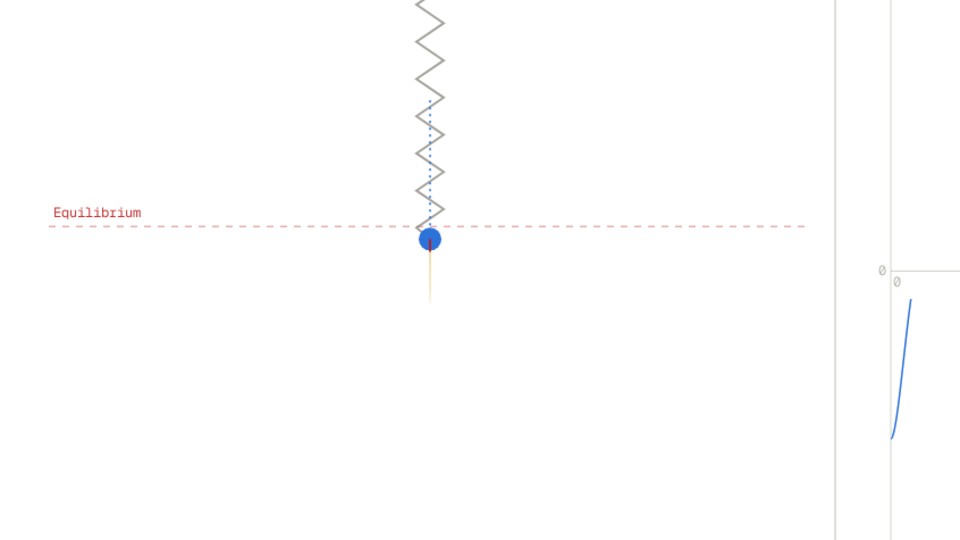
Con los valores por defecto Constante del Resorte 10 N/m, Masa 1,0 kg y Amortiguamiento 3,00 N·s/m, la frecuencia angular natural es ω₀ = sqrt(k/m) = sqrt(10) ≈ 3,162 rad/s, la tasa de decaimiento es γ = c/(2m) = 1,5 s⁻¹ y la razón de amortiguamiento es ζ = c / (2·sqrt(m·k)) ≈ 0,474. Como ζ < 1, la simulación reporta un régimen subamortiguado: la masa parte del Desplazamiento Inicial de 1,0 m, atraviesa la línea de equilibrio en el instante predicho t ≈ 0,741 s y alcanza su primer pico negativo cerca de t ≈ 1,13 s en aproximadamente x ≈ −0,18 m sobre la lectura de Desplazamiento (m).
Cada pico sucesivo se encoge por el mismo factor exponencial e^(−γ·Td), donde Td = 2π/ωd ≈ 2,257 s es el periodo amortiguado y ωd = sqrt(ω₀² − γ²) ≈ 2,784 rad/s. Esa razón da aproximadamente 0,034 para los valores por defecto, así que el segundo pico positivo es cerca de 30 veces más pequeño que el primero y la estela se aplana visiblemente sobre la línea de equilibrio en pocos ciclos. La envolvente que se encoge es independiente de la amplitud inicial, razón por la cual duplicar el deslizador de Desplazamiento Inicial cambia la altura de cada pico proporcionalmente sin alterar los tiempos.
Subir el deslizador de Amortiguamiento sigue desplazando la lectura. La Razón de amortiguamiento cruza 1,0 exactamente en c = 6,32 N·s/m para k = 10 N/m y m = 1 kg, y en ese valor la estela deja de cruzar la línea de equilibrio y en su lugar se desliza directamente de regreso a cero: el régimen críticamente amortiguado. Más allá de ese punto, en c = 20 N·s/m, ζ ≈ 3,16 y la misma liberación desde 1,0 m se arrastra lentamente hacia el equilibrio sin sobrepasarlo, el régimen sobreamortiguado. La transición es nítida porque ωd es una rama de raíz cuadrada que se anula en la frontera.
Ecuaciones clave
Sustituyendo los valores por defecto k = 10 N/m, m = 1,0 kg, c = 3,00 N·s/m da ẍ + 3·ẋ + 10·x = 0. La simulación integra esta misma ODE numéricamente; cada lectura que ve el usuario proviene de avanzar paso a paso desde el estado inicial x = 1,0 m, ẋ = 0.
Para los valores por defecto: ω₀ = sqrt(10 / 1) ≈ 3,162 rad/s. Esta es la frecuencia que el sistema mantendría para siempre si el deslizador de Amortiguamiento se fijara en 0 N·s/m, y es el límite superior de la tasa de oscilación con cualquier amortiguamiento distinto de cero.
Para los valores por defecto: ζ = 3 / (2·sqrt(10)) ≈ 0,474. La lectura de Razón de amortiguamiento de la simulación muestra este valor exacto a tres decimales porque calcula ζ con la misma definición. Cualquier ajuste con ζ < 1 oscila, ζ = 1 regresa directo al reposo, ζ > 1 se arrastra.
Para los valores por defecto: γ = 3 / 2 = 1,5 s⁻¹, así que ωd = sqrt(10 − 2,25) = sqrt(7,75) ≈ 2,784 rad/s. El periodo amortiguado es Td = 2π / ωd ≈ 2,257 s, que el usuario puede confirmar midiendo la separación entre dos cruces por cero consecutivos sobre la estela.
Liberada desde el reposo en x₀ = 1,0 m las constantes son A ≈ 1,137 m y φ ≈ −0,494 rad, dando x(t) ≈ 1,137·e^(−1,5·t)·cos(2,784·t − 0,494). En t ≈ 1,13 s esto evalúa a x ≈ −0,18 m, coincidiendo con el valor del primer pico negativo en la lectura de Desplazamiento (m).
Para k = 10 N/m y m = 1 kg: cc = 2·sqrt(10) ≈ 6,32 N·s/m. Fijar el deslizador de Amortiguamiento en ese valor lleva la lectura de Razón de amortiguamiento a 1,000 y produce el retorno no oscilante más rápido: un único deslizamiento suave desde x = 1,0 m hasta la línea de equilibrio.
Variables clave
| Símbolo | Nombre | Unidad | Significado |
|---|---|---|---|
| x | Desplazamiento | m | Distancia desde el equilibrio |
| m | Masa | kg | Inercia del cuerpo móvil |
| k | Constante del resorte | N/m | Rigidez del resorte |
| c | Coeficiente de amortiguamiento | N·s/m | Intensidad del arrastre viscoso |
| ω₀ | Frecuencia angular natural | rad/s | Tasa de oscilación sin amortiguamiento |
| ωd | Frecuencia angular amortiguada | rad/s | Tasa real cuando ζ < 1 |
| ζ | Razón de amortiguamiento | adimensional | Selecciona el régimen; 1,0 es crítico |
| γ | Tasa de decaimiento | 1/s | Tasa de encogimiento c/(2m) |
Ejemplos del mundo real
¿Por qué los amortiguadores de carro se ajustan justo por debajo del crítico?
La suspensión de un carro de pasajeros se diseña con una razón de amortiguamiento del orden de 0,2 a 0,4 para el confort de la cabina y más cerca de 0,7 para la respuesta de manejo del subsistema rueda–neumático. La elección es deliberada: una suspensión completamente crítica se sentiría dura porque la deflexión del resorte no puede sobrepasar nada, mientras que una poco amortiguada dejaría que el chasis flotara y cabeceara tras un solo bache. Quedarse justo por debajo del crítico le da al cuerpo un sobrepaso pequeño y rápidamente extinguido que enmascara el ruido de la carretera de alta frecuencia sin renunciar al control.
La simulación reproduce el compromiso a lo largo del mismo rango de ζ que se usa en el ajuste real de chasis. Con k = 10 N/m y m = 1,0 kg, fijar Amortiguamiento en 3,00 N·s/m da ζ = 0,474 sobre la lectura y una oscilación decreciente visible que se aplana en pocos ciclos, imitando un carro familiar cómodo. Empujar el deslizador de Amortiguamiento hasta 6,32 N·s/m lleva ζ a 1,000 y la estela regresa directo al equilibrio sin sobrepaso: la frontera entre lo deportivo–firme y lo flotante que los ingenieros de suspensión pasan sus jornadas afinando.
¿Cómo evitan los amortiguadores de masa sintonizada que los edificios altos se balanceen?
Un rascacielos es, dinámicamente, un resorte vertical alto con una razón de amortiguamiento intrínseca pequeña, quizá de 0,01 a 0,02, tan ligera que las ráfagas de viento a la frecuencia natural del edificio pueden bombear suficiente energía para marear a sus ocupantes. Los ingenieros añaden un amortiguador de masa sintonizada, un péndulo de varias toneladas o un bloque deslizante acoplado a la estructura mediante un resorte rígido y un amortiguador pesado. Los parámetros del amortiguador se eligen para que el sistema combinado se comporte como un único amortiguador con ζ cerca de 0,1 a 0,2, reduciendo el balanceo pico por un factor de tres o cuatro durante un tifón.
La simulación ilustra el mecanismo con una versión de masa única de la misma física. Manteniendo k = 10 N/m y m = 1,0 kg fijos y avanzando el deslizador de Amortiguamiento desde 0,50 N·s/m hasta 3,00 N·s/m, la lectura de Desplazamiento (m) muestra el primer pico negativo encogiéndose desde aproximadamente −0,78 m hasta −0,18 m. El amortiguador dentro del Taipei 101 hace el mismo trabajo a una escala enormemente mayor, convirtiendo la energía de balanceo del edificio en calor en el fluido hidráulico del amortiguador antes de que la siguiente ráfaga pueda entrar en resonancia con él.
¿Qué fija el tiempo de respuesta de la aguja de un amperímetro analógico?
Una aguja pivotada de amperímetro se comporta como un sistema torsional masa–resorte–amortiguador. El resorte torsional fija ω₀, la inercia rotacional de la aguja y la bobina fija m, y una película delgada de aceite viscoso o una paleta de cobre fija c. Los diseñadores de instrumentos ajustan c para que el medidor se sitúe en ζ ≈ 1,0, el régimen críticamente amortiguado, porque eso da la lectura más rápida posible sin que la aguja sobrepase y oscile más allá del valor verdadero. Los medidores subamortiguados desperdician el tiempo del operario esperando a que se apaguen las oscilaciones; los sobreamortiguados se retrasan.
La simulación cuantifica la penalización de tiempo por desviarse del amortiguamiento crítico. Con k = 10 N/m y m = 1,0 kg, fijar el deslizador de Amortiguamiento en 6,32 N·s/m da ζ = 1,000 sobre la lectura y la traza de Desplazamiento (m) decae a menos del 1 % del equilibrio en aproximadamente 4,6 s. Recortar el deslizador de Amortiguamiento a la mitad, hasta 3,00 N·s/m, baja ζ a 0,474 y el mismo objetivo de asentamiento del 1 % se desliza más allá de los 6 s una vez que se incluye la envolvente residual de oscilación, exactamente la penalización de diseño en torno a la cual los fabricantes de medidores calibran.
Lecturas adicionales
- Movimiento armónico simple: la línea base masa–resorte sin amortiguamiento que este artículo especializa al añadir un término de arrastre proporcional a la velocidad en la ecuación de movimiento.
- Movimiento de proyectil: un sistema newtoniano no oscilante que comparte la maquinaria de ODE lineal usada para derivar la solución del resorte amortiguado.