Velocidad media vs instantánea · FísicaDe la tasa media a la instantánea
Introducción
La velocidad media sobre un intervalo es un solo número: el cambio de posición dividido por el cambio de tiempo. La velocidad instantánea en un momento es también un solo número, pero alcanzarla requiere reducir el intervalo a cero, que es la definición formal de una derivada. El simulador en esta página muestra ese límite ocurriendo de manera geométrica: una secante arrastrable sobre una curva posición-tiempo rota hacia la tangente a medida que el intervalo Δt se reduce desde 2 s hasta 0,05 s, y las dos lecturas de velocidad convergen mientras la visualización corre.
Esta es la frontera entre cinemática y cálculo: la definición límite v = lim(Δt → 0) Δx/Δt es el momento en que un problema de cinemática deja de ser álgebra y empieza a ser cálculo. La curva del simulador x(t) = 3·sen(0,5·t) + 0,8·t es no uniforme a propósito (ni la velocidad media ni la instantánea son constantes), así que la brecha entre ellas siempre es medible y la convergencia siempre es observable. Una vez que un estudiante puede ver la secante rotar hacia la tangente en pantalla, el dx/dt simbólico deja de ser una notación y se vuelve un objeto geométrico.
Se asume con frecuencia que la velocidad media y la instantánea coinciden siempre que el movimiento sea constante. Las lecturas desmienten esa idea: incluso con Δt = 1,0 s (un intervalo moderadamente pequeño) las dos lecturas pueden diferir en 0,10 m/s o más, dependiendo de dónde sobre la curva se tome la medida. Solo convergen cuando Δt llega al fondo del rango del deslizador, e incluso entonces la coincidencia es dentro de ±0,02 m/s, nunca exacta. El límite se aproxima, nunca se alcanza.
La física explicada
El simulador avanza el tiempo t a tasa fija de 0 a MAX_TIME = 20 s. En cada cuadro evalúa la función de posición x(t) = 3·sen(0,5·t) + 0,8·t (un término oscilatorio más una deriva constante), calcula la velocidad instantánea v(t) = 1,5·cos(0,5·t) + 0,8 (la derivada) y calcula una velocidad media v̄ sobre el intervalo [t, t + Δt] usando dos evaluaciones de x. Con Δt = 1,0 s en t ≈ 5,00 s las lecturas muestran aproximadamente Vel. media ≈ −0,50 m/s y Vel. inst. ≈ −0,40 m/s: cercanas, pero no iguales.
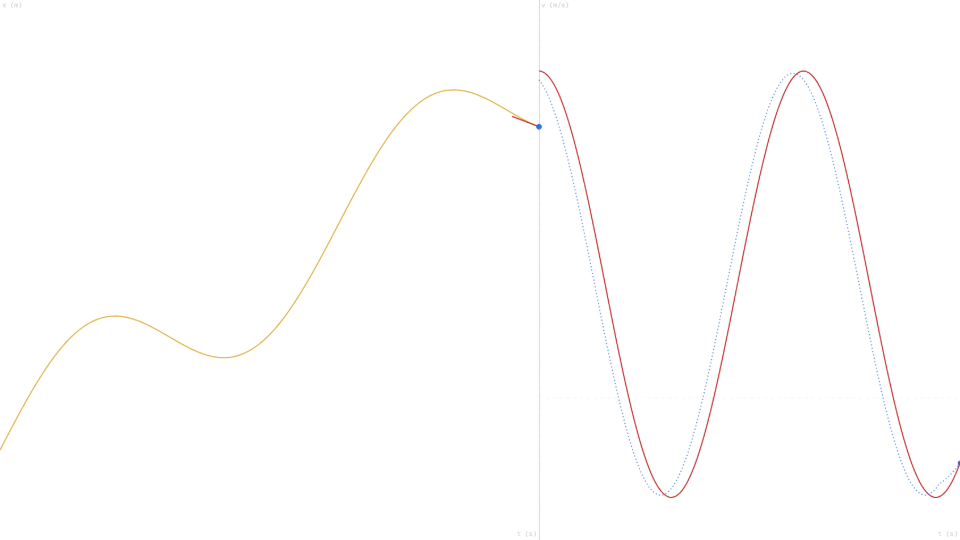
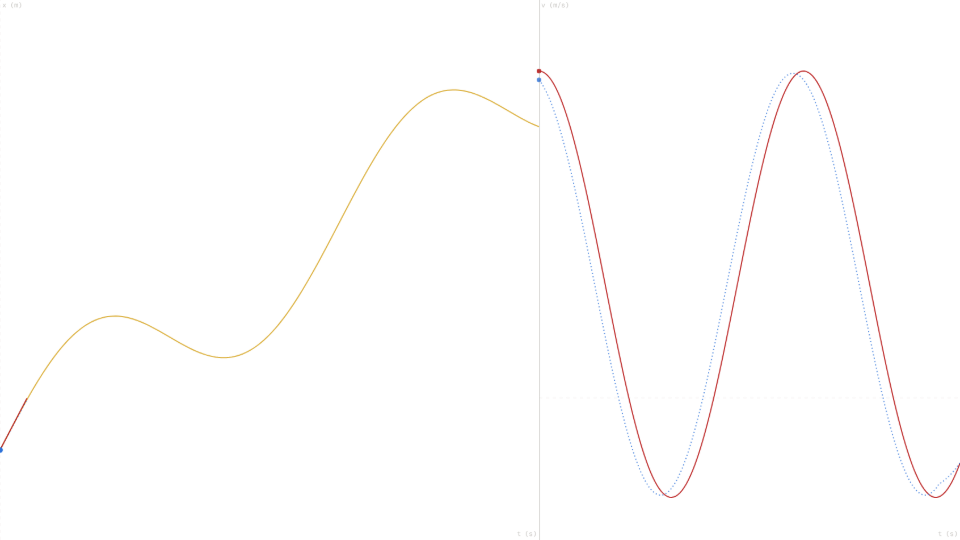
El panel izquierdo hace visible la geometría del límite. La curva ámbar es la función de posición; la línea azul discontinua es una secante que conecta (t, x(t)) y (t + Δt, x(t + Δt)); la línea roja sólida es la tangente en el punto actual con pendiente igual a la velocidad instantánea. Al mover el deslizador Δt desde 2,0 s hasta 0,05 s con la simulación en pausa, la secante rota suavemente hacia la tangente. En Δt = 0,05 s las dos líneas se superponen visualmente en pantalla: la secante se ha vuelto la tangente dentro de la precisión de renderizado.
El panel derecho hace visible la misma convergencia de manera global en lugar de local. La curva roja sólida es v(t), la velocidad instantánea en cada t. La curva azul discontinua es v̄(t, t + Δt), la velocidad media sobre una ventana de longitud Δt que empieza en t, graficada en cada t. Con Δt = 2,0 s la curva azul es una versión suavizada de la roja: picos cortados, valles rellenados, medio período de retraso de fase. Con Δt = 0,05 s la curva azul se sitúa encima de la roja a lo largo de toda la corrida, y las dos son visualmente indistinguibles.
La convergencia se aproxima, nunca se alcanza, porque el error residual escala con Δt. Para una función suave como x(t) = 3·sen(0,5·t) + 0,8·t el término principal del error en v̄ − v es proporcional a (1/2)·x″(t)·Δt, la mitad de la segunda derivada por el intervalo. En t = 5 s la segunda derivada es x″(5) = −0,75·sen(2,5) ≈ −0,449 m/s², así que el error con Δt = 0,05 s es aproximadamente (1/2)·(−0,449)·0,05 ≈ −0,011 m/s, bien dentro de la precisión de dos decimales del display de las lecturas. Reducir Δt por otro factor de 10 reduciría esto a 0,0011 m/s; el límite es matemáticamente infinito, pero la coincidencia físicamente significativa se alcanza casi de inmediato.
Ecuaciones clave
La curva ámbar trazada en el panel izquierdo. Con t en segundos y x en metros, la función oscila con amplitud de 3 m y frecuencia angular de 0,5 rad/s (período ≈ 12,57 s) sobre una deriva lineal de 0,8 m/s. En t = 5 s la posición es x(5) = 3·sen(2,5) + 4 ≈ 5,80 m, exactamente el valor que la lectura de Posición muestra cuando el simulador está pausado en ese momento.
La pendiente de la secante sobre la gráfica posición-tiempo. Con Δt = 2 s en t = 5 s los valores son x(5) ≈ 5,80 m y x(7) ≈ 4,55 m, así que v̄ = (4,55 − 5,80) / 2 ≈ −0,62 m/s, exactamente el valor que la lectura de Vel. media muestra en ese momento, y exactamente la pendiente de la línea azul discontinua sobre la gráfica posición-tiempo.
La pendiente de la tangente sobre la gráfica posición-tiempo, también la derivada de la función de posición. Para el x(t) específico del simulador la derivada es v(t) = 1,5·cos(0,5·t) + 0,8. En t = 5 s esto evalúa a v(5) = 1,5·cos(2,5) + 0,8 ≈ −0,40 m/s, exactamente el valor que la lectura de Vel. inst. muestra, y la pendiente de la línea roja sólida sobre la gráfica posición-tiempo.
Para x(t) suave la brecha entre velocidad media e instantánea escala linealmente con Δt. El x″(t) del simulador es −0,75·sen(0,5·t), así que en t = 5 s y Δt = 0,05 s la brecha predicha es (1/2)·(−0,75·sen(2,5))·0,05 ≈ −0,011 m/s, lo bastante pequeña para que las lecturas de dos decimales muestren ambas ≈ −0,40 m/s. Reducir Δt a la mitad reduce la brecha a la mitad; el límite se aproxima a tasa de primer orden.
Variables clave
| Símbolo | Nombre | Unidad | Significado |
|---|---|---|---|
| x(t) | Posición | m | Ubicación del objeto en el tiempo t; equivale a 3·sen(0,5·t) + 0,8·t en este sim |
| Δt | Intervalo | s | Valor del deslizador, rango 0,05 a 2,0 s; define la extensión horizontal de la secante |
| v̄ | Velocidad media | m/s | Pendiente de la secante; equivale a (x(t+Δt) − x(t)) / Δt |
| v | Velocidad instantánea | m/s | Pendiente de la tangente; equivale a dx/dt en el t actual |
| x″(t) | Aceleración | m/s² | Segunda derivada; fija el error principal en v̄ − v conforme Δt se reduce |
Ejemplos del mundo real
¿Cómo reporta una pistola de radar una sola velocidad para un coche en movimiento cuando la velocidad del coche cambia en cada instante?
Una pistola de radar policial dispara un pulso de microondas, mide el desplazamiento Doppler del retorno y lo convierte en un número de velocidad, y ese número es, matemáticamente, una velocidad instantánea en el momento de la medida, no un promedio sobre toda la aproximación. El pulso de la pistola es lo bastante corto (típicamente decenas de milisegundos) que la velocidad del coche apenas cambia durante la ventana de medida, así que la pendiente de la secante sobre la curva posición-tiempo subyacente sobre ese Δt diminuto es indistinguible de la pendiente de la tangente en el mismo instante.
El simulador hace visible este régimen: con Δt = 0,05 s la secante azul discontinua sobre la curva posición-tiempo se sitúa encima de la tangente roja, y las dos lecturas coinciden dentro de ±0,02 m/s. Una pistola de radar con un pulso de 50 ms opera exactamente en esa escala de Δt; la velocidad mostrada es la velocidad instantánea en el punto medio del pulso, calculada por una razón que converge en la derivada. La razón completa por la que las pistolas de radar funcionan como herramienta de un solo número es que la física subyacente (la razón Doppler) resulta evaluar la definición límite directamente, con Δt fijado por la longitud del pulso en lugar de por el usuario.
¿Por qué un entrenador de velocidad cronometra una carrera de 100 m hasta los 0,01 s en lugar de registrar la rapidez media global?
Una carrera de 100 m cronometrada en 9,80 s da una velocidad media de 10,20 m/s, pero ningún humano corre a 10,20 m/s constantes durante toda la carrera. La fase de impulso desde los tacos va a unos 4-6 m/s; la fase de velocidad máxima a media carrera va a 11-12 m/s; el final suele decelerar ligeramente. Los parciales en 30 m y 60 m permiten al entrenador reconstruir la curva de velocidad e identificar dónde el corredor es más rápido y dónde está perdiendo tiempo.
Es el mismo problema que el simulador visualiza: un único promedio sobre toda la corrida oculta la estructura que importa. Con Δt en 2,0 s, la curva azul de velocidad media en el panel derecho es una aproximación suavizada de la curva instantánea; con Δt en 0,05 s el suavizado desaparece, exponiendo cada pico y valle. Los parciales de cronometraje son implementaciones físicas de elegir un Δt lo bastante pequeño para que la velocidad media sobre cada parcial aproxime la velocidad instantánea en el centro de ese parcial: la fase de impulso se lee como un número, la fase de velocidad máxima como otro y la deceleración como un tercero, aunque las tres son técnicamente promedios.
¿Cómo convierte un acelerómetro de teléfono el movimiento bruto en un conteo de pasos?
El acelerómetro de un teléfono muestrea aceleración a 50-100 Hz; integrando una vez se obtiene velocidad, integrando dos veces se obtiene posición. Pero la integración misma es una secuencia de cálculos de velocidad media: entre muestras consecutivas (Δt = 10-20 ms) el acelerómetro asume velocidad constante igual al promedio sobre ese intervalo, luego suma los desplazamientos. El simulador muestra el régimen de exactitud en el que esto vive: con Δt = 0,05 s (comparable a un intervalo de acelerómetro de 20 ms) la lectura de velocidad media difiere de la instantánea en menos de 0,05 m/s, lo cual está muy por debajo del piso de ruido del sensor subyacente.
La detección de pasos busca después picos periódicos en la señal de aceleración que se correlacionan con apoyos del pie; cada pico es un paso. Toda la cadena depende de la misma convergencia que el simulador lo revela: la velocidad media sobre un Δt corto es un sustituto utilizable de la velocidad instantánea, y el error residual escala con el propio Δt. Muestrear más rápido (Δt menor) hace la integración más exacta, pero el consumo de batería sube; muestrear más lento (Δt mayor) ahorra energía pero la brecha secante-vs-tangente se come la exactitud. El compromiso en el podómetro de tu teléfono es el mismo compromiso que el deslizador del simulador hace visible.
Lecturas adicionales
- Trazador de movimiento 1D: el caso de velocidad constante, donde la curva posición-tiempo es una línea recta y la secante equivale a la tangente en cada Δt.
- Graficador velocidad-tiempo: aceleración constante, donde v(t) = a·t y la velocidad media sobre [0, t] es exactamente la mitad de v(t) sin importar Δt.
- Posición de dos corredores: dos cuerpos a velocidad constante en la misma línea, donde la pendiente de la secante de cada corredor equivale a la pendiente de su tangente en cada intervalo.
- Caída libre: aceleración constante hacia abajo, el siguiente paso donde la segunda derivada es no cero y la brecha secante-vs-tangente crece linealmente con Δt.
- Carrito de aceleración constante: el caso de v(t) lineal donde la media sobre cualquier intervalo equivale a la instantánea del punto medio, una identidad que vuelve exactamente cero la brecha secante-vs-tangente en el centro del intervalo sin importar Δt.
- Aceleración variable: el caso totalmente general donde a(t) varía en el tiempo; el error residual en la aproximación secante-vs-tangente depende de la segunda derivada local, que el perfil de a variable vuelve visible directamente a través de la curva de entrada trazada.