Posición de dos corredores · FísicaTiempo de encuentro por brecha y cierre
Introducción
Dos cuerpos que se mueven a lo largo de la misma línea con velocidades constantes forman el escenario de cinemática de dos cuerpos no trivial más simple. Cada cuerpo tiene su propia posición de partida y su propia velocidad constante, las ecuaciones de posición xₐ(t) = x0A + vA·t y xβ(t) = x0B + vβ·t evolucionan de forma independiente, y lo único que las une es la pregunta de cuándo coinciden. El simulador en esta página permite responder esa pregunta de manera visual, ambos corredores trazan rectas en una gráfica posición-tiempo y el momento en que esas rectas se cruzan es el tiempo de encuentro.
Este tema cimienta la cinemática introductoria porque cada problema más sofisticado (detección de colisiones, intercepciones orbitales, intercepciones de proyectiles, incluso análisis de dispersión en física de partículas) se reduce, en su forma más simple, a «cuándo y dónde se encuentran dos trayectorias». Leer el tiempo de encuentro de una gráfica es más visual que algebraico, y un estudiante que pueda predecir el punto de intersección con un vistazo a las pendientes ha interiorizado la idea de velocidad relativa que la forma cerrada tmeet = (x0B − x0A) / (vA − vβ) solo enuncia simbólicamente. El marco de carrera (el primer corredor en alcanzar la meta de 100 m gana) añade una condición de fin que hace que la simulación termine por un evento físico en lugar de un tiempo de espera arbitrario.
De entrada uno supondría que el tiempo de encuentro depende de cuánto tiene que viajar cada corredor. El simulador apunta al revés: con los valores por defecto el tiempo de encuentro depende solo de la brecha inicial (10 m) dividida por la velocidad de cierre (3 m/s), dando tmeet ≈ 3,33 s sin importar cómo se reparta la brecha entre las dos posiciones de partida o qué tan rápido se mueva cada corredor en términos absolutos.
La física explicada
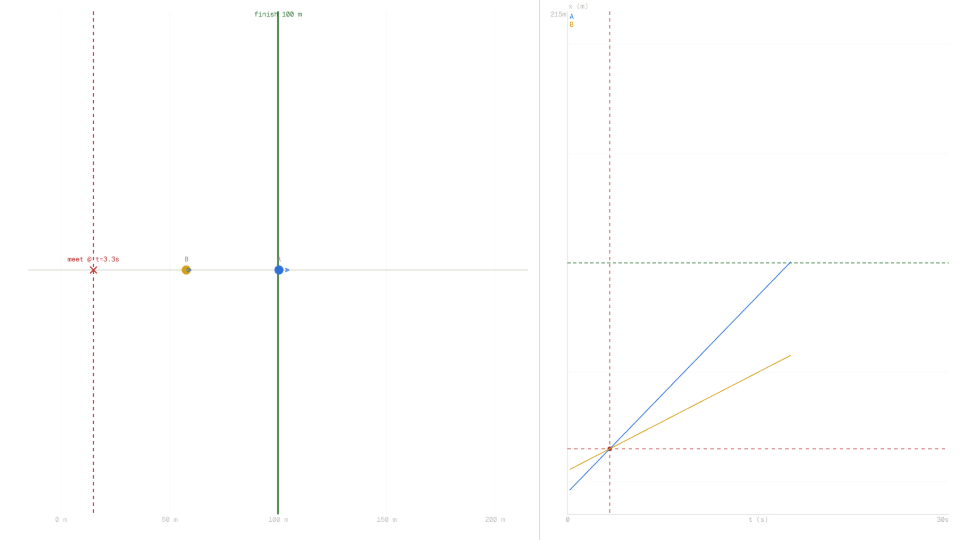
Cada corredor se mueve bajo fuerza neta cero, así que la primera ley de Newton garantiza una velocidad constante durante todo el recorrido. El simulador libera a ambos corredores en t = 0 desde las posiciones x0A y x0B con las velocidades vA y vβ fijadas por los deslizadores. Con los valores por defecto x0A = −5 m, vA = 6 m/s, x0B = 5 m, vβ = 3 m/s, la gráfica posición-tiempo traza dos rectas cuyas pendientes son 6 m/s (Corredor A, azul) y 3 m/s (Corredor B, ámbar). Las rectas con pendientes distintas se cruzan exactamente una vez; las rectas con la misma pendiente nunca se cruzan.
La lectura de Brecha es el indicador en pantalla de la velocidad relativa. Empieza en 10,0 m (la separación inicial 5 − (−5)) y disminuye exactamente a 3,0 m/s, la diferencia vA − vβ. Cuando la lectura de Brecha cruza cero los corredores coinciden, y en ese momento ambas lecturas Corredor A y Corredor B muestran ≈ 15,0 m y el marcador rojo de encuentro en la pista se sitúa en la intersección. El tiempo de intersección se obtiene de igualar las dos ecuaciones de posición: tmeet = (x0B − x0A) / (vA − vβ) = 10 / 3 ≈ 3,33 s, exactamente el valor que la lectura de Tiempo muestra cuando la Brecha primero llega a cero.
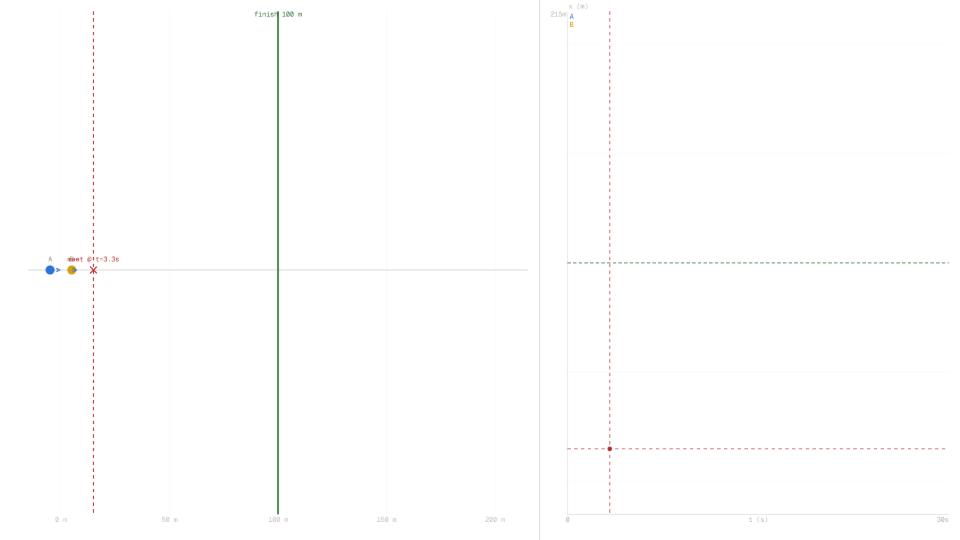
La carrera continúa más allá del punto de encuentro porque un encuentro no es una meta. El corredor A sigue cerrando sobre la línea de meta verde en x = 100 m, alcanzándola en t = (100 − (−5)) / 6 = 17,50 s, y la simulación se detiene en el momento de ese cruce. El corredor B en t = 17,50 s está en x = 5 + 3·17,50 = 57,5 m, todavía a 42,5 m de la meta. La lectura de Tiempo se congela en 17,50 s, la lectura de Brecha muestra −42,5 m (el corredor A va ahora por delante), y la simulación ha terminado por un evento físico en lugar de un tope de seguridad arbitrario de 30 s.
Las velocidades iguales son el caso límite algebraico que vale la pena ver en pantalla. Fijar vA = vβ = 5 m/s con posiciones de partida distintas hace que las dos rectas x(t) sean paralelas: nunca se cruzan, la lectura de Brecha mantiene su valor inicial para siempre, y la fórmula del tiempo de encuentro retorna nulo porque dividir entre cero está indefinido. El simulador maneja este caso de forma explícita (la función meetingTime retorna null cuando la velocidad relativa cae por debajo de 1 × 10⁻⁹ m/s) y la ausencia del marcador rojo de encuentro es la firma visual de una configuración de no encuentro.
Ecuaciones clave
Para los valores por defecto x0A = −5 m, vA = 6 m/s, x0B = 5 m, vβ = 3 m/s, las posiciones de los corredores en t = 2 s son xₐ = −5 + 6·2 = 7 m y xβ = 5 + 3·2 = 11 m. Las lecturas Corredor A y Corredor B se pausan en exactamente 7,0 m y 11,0 m cuando la simulación se pausa en t = 2,00 s, con la lectura de Brecha mostrando 4,0 m, la distancia de cierre después de que la velocidad relativa ha consumido 6 m de la brecha original de 10 m.
Igualar xₐ(t) = xβ(t) y despejar t da la intersección en forma cerrada. Con los valores por defecto tmeet = (5 − (−5)) / (6 − 3) = 10 / 3 ≈ 3,33 s. La lectura de Tiempo muestra exactamente ese valor cuando la lectura de Brecha primero cruza cero, y la línea roja discontinua en la gráfica posición-tiempo cae en t = 3,33 s, tres confirmaciones independientes en pantalla del mismo número. La fórmula está indefinida cuando vA = vβ y el simulador maneja ese caso retornando nulo y omitiendo el marcador de encuentro.
El tiempo de meta del corredor A en xfinish = 100 m es (100 − (−5)) / 6 = 17,50 s; el del corredor B sería (100 − 5) / 3 ≈ 31,67 s. Ya que el simulador se detiene en el primer cruce, se detiene en 17,50 s con el corredor A leyendo 100,0 m y el corredor B leyendo 57,5 m. Quien tenga el menor tfinish gana la carrera, y la fórmula hace esa comparación puramente aritmética, sin necesidad de esperar a que la simulación termine.
La brecha disminuye linealmente cuando vA > vβ y aumenta linealmente cuando vA < vβ. Con los valores por defecto gap(0) = 10 m, gap(2) = 10 − 3·2 = 4 m, gap(3,33) = 0 m, exactamente los valores que la lectura de Brecha recorre. Después del punto de encuentro la brecha se vuelve negativa porque el corredor A va ahora por delante, y en la meta de t = 17,50 s la lectura muestra gap = −42,5 m.
Variables clave
| Símbolo | Nombre | Unidad | Significado |
|---|---|---|---|
| x0A, x0B | Posiciones iniciales | m | Posiciones de partida de los corredores A y B en la pista |
| vA, vβ | Velocidades constantes | m/s | Velocidades que los corredores mantienen durante la carrera; el signo indica dirección |
| tmeet | Tiempo de encuentro | s | Tiempo en el que los dos corredores coinciden; nulo cuando vA = vβ |
| xfinish | Posición de meta | m | Fija en 100 m; la carrera se detiene en el momento en que cualquiera la cruza |
| gap | Separación | m | Distancia con signo xβ − xₐ; la lectura que indica quién va por delante |
Ejemplos del mundo real
¿Cómo predicen los controladores aéreos cuándo dos aeronaves convergentes alcanzarán la separación mínima?
Dos aeronaves en trayectorias que se cruzan se reducen al mismo problema de tiempo de encuentro que el simulador ejecuta: posiciones xₐ(t) y xβ(t) medidas a lo largo de la línea que conecta a las dos aeronaves, cada una con su propia componente de velocidad constante a lo largo de esa línea. La pantalla del controlador hace el trabajo geométrico de forma continua, pero el cálculo subyacente es la forma cerrada tmeet = (x0B − x0A) / (vA − vβ) aplicada a la geometría de cierre de las trayectorias convergentes.
Con x0A = −5 m, vA = 6 m/s, x0B = 5 m y vβ = 3 m/s, el simulador da tmeet = 10 / 3 ≈ 3,33 s y una posición de encuentro de 15 m, exactamente el tipo de predicción de un solo número que un controlador quiere de un par convergente. El modelo se rompe en el momento en que cualquiera de las aeronaves acelera, vira o cambia de altitud, razón por la cual los controladores emiten instrucciones de rumbo y velocidad para extender el régimen de velocidad constante el tiempo suficiente para hacer la predicción confiable. Los sistemas modernos de detección de conflictos añaden conos de predicción y márgenes de incertidumbre por encima de esta línea base, pero la columna vertebral de cada alerta de conflicto sigue siendo la misma aritmética lineal del tiempo de encuentro que el simulador visualiza.
¿Por qué un ciclista más rápido que arranca detrás de uno más lento siempre lo alcanza en una carretera plana?
Dos ciclistas que mantienen velocidades constantes en una carretera plana obedecen las mismas ecuaciones xₐ(t) = x0A + vA·t que el simulador grafica, con la fórmula del tiempo de encuentro tmeet = (x0B − x0A) / (vA − vβ) diciéndole al perseguidor exactamente cuánto tardará el alcance. Fija el simulador en vA = 6 m/s y vβ = 3 m/s con el ciclista más lento 10 m por delante y el tiempo de cierre es tmeet = 10 / 3 ≈ 3,33 s, con el punto de alcance en 15 m.
El resultado depende solo de la brecha y la diferencia de velocidades, no de cualquier velocidad absoluta, un ciclista 10 m por detrás a vA = 4 m/s alcanza a un líder a vβ = 3 m/s en exactamente los mismos 10 s que cualquier par separado por 10 m y cerrando a 1 m/s tomaría. El alcance nunca ocurre si las velocidades son iguales: la brecha se mantiene en 10 m para siempre, lo cual explica por qué ir al rebufo de un ciclista ligeramente más rápido se siente como un tirón inevitable en un tramo plano sin viento. El simulador reproduce el caso de velocidades iguales de forma directa, fija vA = vβ = 5 m/s y la lectura de Brecha nunca se mueve de su valor inicial.
¿Qué dice la fórmula del tiempo de encuentro sobre un velero virando contra una lancha más rápida?
Proyecta los dos botes sobre la línea que conecta sus posiciones iniciales y el problema del tiempo de encuentro se reduce a dos velocidades efectivas a lo largo de esa línea. Si la lancha cierra a vA = 6 m/s mientras el velero se aleja a vβ = 3 m/s a lo largo del mismo eje, la velocidad de cierre es vA − vβ = 3 m/s y una separación inicial de 10 m colapsa en tmeet = 10 / 3 ≈ 3,33 s, la carrera por defecto del simulador hace la misma predicción.
Fijar ambos botes en la misma velocidad proyectada (vA = vβ = 5 m/s en el simulador) reproduce el resultado clásico de que la lancha nunca alcanza al velero: la brecha se mantiene constante, las rectas paralelas x(t) nunca se intersectan y tmeet retorna nulo. La misma aritmética rige cada problema de persecución de dos cuerpos en mecánica introductoria, desde partículas en un túnel de viento hasta barcos en el mar, y el marco de carrera-hasta-la-meta del simulador (el primero en llegar a 100 m gana) añade la condición práctica de fin que convierte una predicción de encuentro en una predicción de ganador.
Lecturas adicionales
- Trazador de movimiento 1D: movimiento uniforme de un solo cuerpo, donde la gráfica posición-tiempo es una sola recta y la pregunta del tiempo de encuentro colapsa a una pregunta de tiempo objetivo.
- Graficador velocidad-tiempo: añade aceleración constante, donde la posición se vuelve una parábola y la gráfica de doble eje muestra cómo la velocidad se integra en desplazamiento.
- Caída libre: el siguiente paso más allá de la velocidad constante, donde la gravedad añade una aceleración constante hacia abajo y la gráfica posición-tiempo se curva en una parábola.
- Movimiento de proyectil: movimiento uniforme en dos dimensiones a la vez, con el eje horizontal comportándose como los corredores de esta página y el eje vertical añadiendo gravedad.
- Carrito de aceleración constante: el siguiente paso más allá de la velocidad constante, donde la rapidez de cada corredor cambiaría durante la carrera y la fórmula del tiempo de encuentro cede ante la cuadrática x(t) = v₀·t + ½·a·t².
- Velocidad media vs instantánea: el límite del cálculo que da sentido a las pendientes de la secante; en esta página la secante de cada corredor equivale a su tangente porque ambos se mueven a velocidad constante, así que el límite colapsa a un único número.