Circular Motion Vectors · SimulatorSee Velocity & Acceleration Vectors
An object on a circular track with live position, velocity (tangent), and centripetal acceleration vectors.
Published: May 22, 2026 · Updated: May 28, 2026
Objective
Verify that a point mass in uniform circular motion maintains constant speed v = ω · r while its centripetal acceleration a_c = ω² · r points continuously inward toward the center. The simulation renders the velocity vector tangent to the track and the centripetal acceleration vector toward the center (both updated in real time), so the geometric relationships become visible rather than abstract. The model assumes a massless, frictionless circular track with no air drag.
Setup
- Set Radius to 4 m and Angular Speed to 1.5 rad/s (the defaults). Before pressing Start, note the Speed readout (6.00 m/s) and Accel readout (9.00 m/s²); these are the predicted constant values.
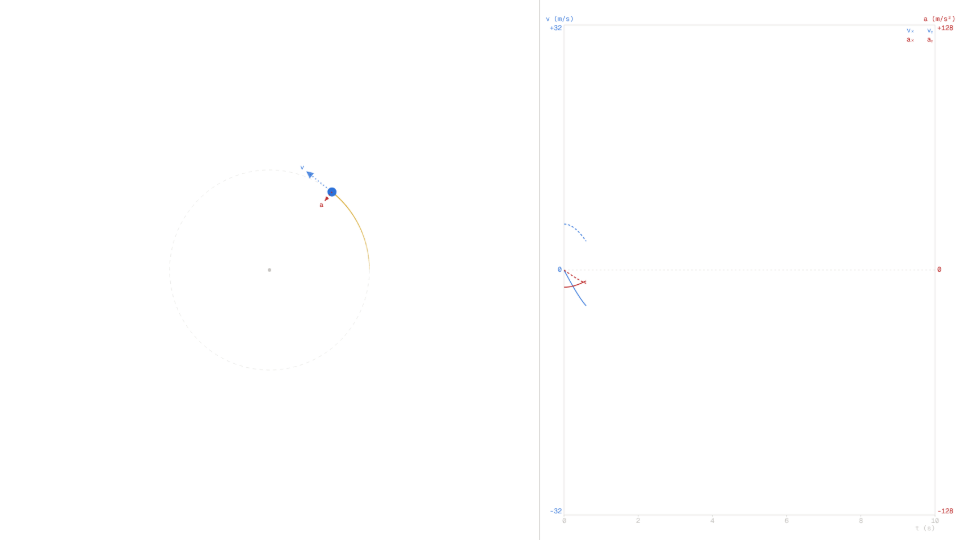
- Press Start and watch the object orbit. Observe that the blue dashed velocity arrow always points tangent to the circle while the red dashed arrow always points toward the center.
- After two full revolutions (about 8.4 s at ω = 1.5 rad/s), read the Speed and Accel readouts; confirm they hold steady at 6.00 m/s and 9.00 m/s² throughout.
- Press Reset, change Radius to 2 m (keep ω = 1.5 rad/s), and press Start. Predicted values: v = 3.00 m/s, a_c = 4.50 m/s². Confirm the HUD matches.
- Press Reset, set Angular Speed to 3.0 rad/s and Radius to 4 m. Predicted: v = 12.00 m/s, a_c = 36.00 m/s². Press Start and confirm.
Analytical Prediction
For uniform circular motion the speed and centripetal acceleration depend only on radius and angular speed:
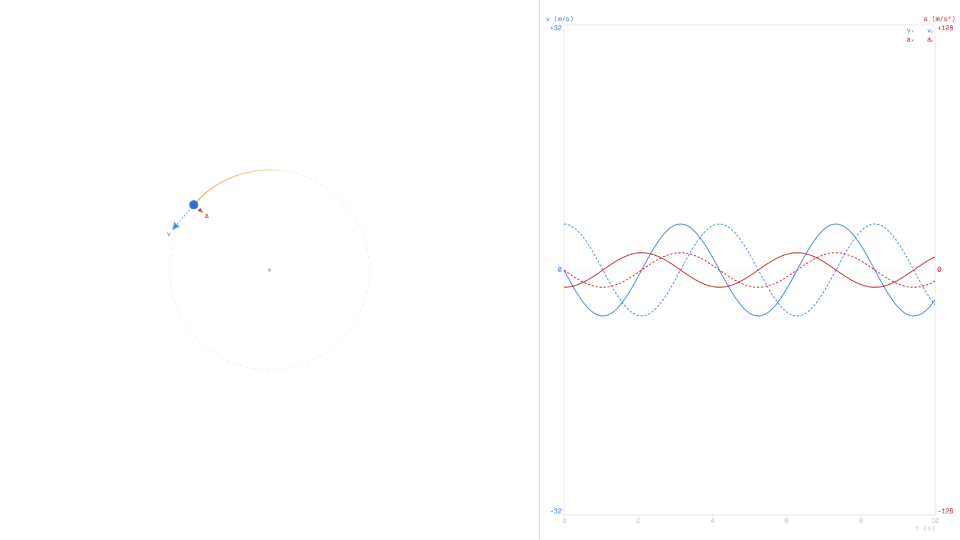
At the default settings (r = 4 m, ω = 1.5 rad/s) the Speed readout holds at 6.00 m/s and the Accel readout at 9.00 m/s² for the entire 10-second run; both values are geometrically fixed once ω and r are fixed. The Angle readout cycles from 0 to ≈ 6.28 rad as the object completes each orbit. The secondary panel overlays four time-series on one combined dual-axis frame: vₓ and vᵧ on the left scale (m/s, fixed at ±32), aₓ and aᵧ on the right scale (m/s², fixed at ±128), all sharing a 0-to-30 s time axis. Even though |v| and |a_c| are constant, the components trace sinusoids: vᵧ leads vₓ by 90°, and the acceleration components are 180° out of phase with position, revealing the rotating-vector geometry behind the constant-magnitude readouts. The line accumulates across the run without erasing, so the full trajectory stays visible until you press Reset.
Results Analysis
Start the simulation at default settings and read the four HUD boxes. Speed (vOut) should show 6.00 m/s and Centripetal Accel (acOut) should show 9.00 m/s² immediately and hold those values throughout the 10-second run; drift larger than ±0.01 m/s or ±0.01 m/s² would indicate a physics error. The Angle readout (angOut) cycles from 0 to approximately 6.28 rad per revolution. The secondary panel overlays vₓ, vᵧ (blue, left scale) and aₓ, aᵧ (red, right scale) on the same fixed-axis frame. All four traces are sinusoids of equal amplitude within each color group with a 90° phase offset between the x and y components, the visual signature of a constant-magnitude rotating vector. Confirm vₓ peaks at ±6.00 m/s and aₓ peaks at ±9.00 m/s² when the object crosses the x-axis (these will appear as small oscillations against the ±32 m/s and ±128 m/s² axis extremes; that is intentional so the curves stay comparable across slider settings).

Source of Error
This simulation models ideal uniform circular motion: the object has no mass, no friction, no air resistance, and no tangential force component. The track is a perfect mathematical circle with fixed radius; no elastic deformation or vibration is modeled. The point-mass idealization means rotational inertia and gyroscopic effects are absent. The analytical predictions v = ω·r and a_c = ω²·r assume the same idealizations, so model and analysis cancel rather than accumulate error. Any residual gap between the predicted and displayed values is therefore purely numerical, not physical, for this sim.
Further Exploration
- Set Radius to 8 m and Angular Speed to 4 rad/s: the HUD should read a_c = 128 m/s². Now halve the radius to 4 m keeping ω fixed. Does the acceleration readout halve exactly, as a_c = ω²·r predicts?
- Keep Radius fixed at 4 m and sweep Angular Speed from 0.5 to 4 rad/s. The Speed readout grows linearly (v = ω·r) while the Accel readout grows quadratically (a_c = ω²·r). Can you identify the angular speed at which a_c numerically equals v?
- Set Angular Speed to 1.0 rad/s and compare the orbit for r = 2 m versus r = 8 m. The period T = 2π/ω is independent of radius. Do both objects complete one revolution in the same ≈ 6.28 seconds? Watch the Angle readout to confirm.
- At ω = 4 rad/s and r = 8 m, the centripetal acceleration reaches 128 m/s² ≈ 13 g. What radius and angular speed combination gives exactly a_c = 9.81 m/s², one standard gravity? Solve ω²·r = 9.81 for several (ω, r) pairs within the slider ranges and verify each on the sim.