2D Collision PhysicsMomentum Vectors in Two Dimensions
Introduction
A two-dimensional collision happens whenever two moving objects meet off-centre, so neither one can be tracked along a single straight line. Momentum still has to balance, but now it balances as a vector: the x-component of total momentum is conserved separately from the y-component, and the same elastic-collision rules that worked along a single axis must be reapplied along the line joining the two centres at the instant of contact. The simulator stages this on a frictionless surface with two equal balls, an adjustable approach angle, and live readouts for v₁, v₂, p, KE, and the post-collision angle θ₁ after.
The geometry shows up everywhere kinetic energy survives a collision: billiards, snooker, ice hockey, particle scattering in a bubble chamber, and even comet flybys past a planet. Once the impact axis is identified, the only piece of dynamics that matters is the one-dimensional elastic exchange along that axis; every tangential component sails through unchanged. That decomposition turns a tangled-looking 2D problem into a 1D problem dressed in vector clothing, and explains why the same handful of equations rules a snooker break shot, a Rutherford-scattering experiment, and a NASA gravity assist.
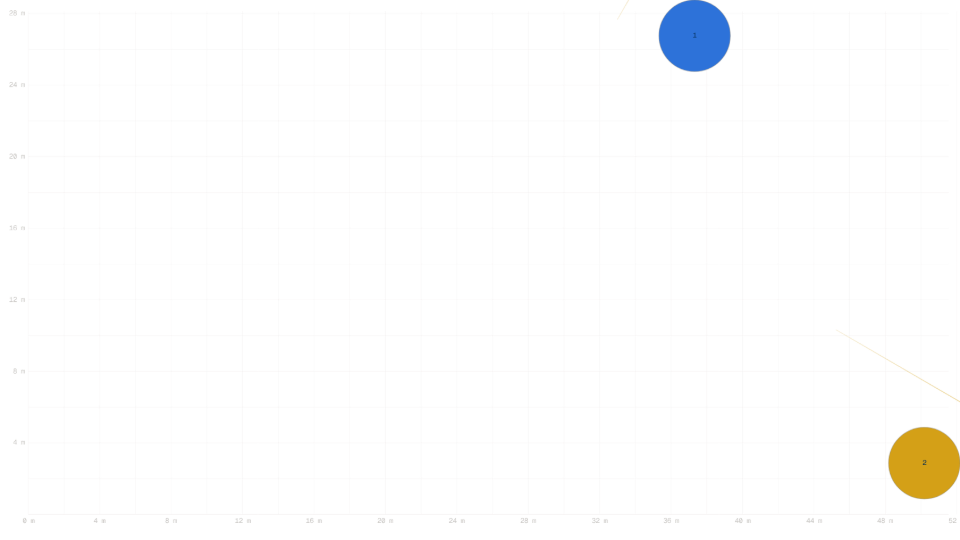
Equal balls meeting off-centre look as though they should fan out symmetrically, both deflected by the same angle. The readouts with m₁ = m₂ = 2.0 kg, v₁ = 8.0 m/s, v₂ = 0, and an approach angle of 30° tell a different story: θ₁ after settles at 60.0° while Ball 2 leaves at −30.0°, so the two outgoing paths sit at exactly 90°, never the symmetric V-split that the fan-out picture predicts.
The Physics Explained
Conservation of momentum is the master equation, and in two dimensions it splits into two independent statements. The x-component of total momentum before the collision must equal the x-component after, and the same holds along y. With m₁ = m₂ = 2.0 kg, v₁ = 8.0 m/s along +x, and v₂ = 0, the initial total is p = 16.000 kg·m/s pointed entirely along the x-axis. The simulator's p readout sits on 16.000 kg·m/s before launch, and after the collision the same readout still reads 16.000 kg·m/s: the vector sum of the two outgoing momenta reconstructs the original arrow exactly.
Kinetic energy is the second conserved quantity, and it is what makes the collision elastic. The KE readout starts at ½ · 2 · 8² = 64.00 J. After the impact, Ball 1 carries ½ · 2 · 4.00² = 16.00 J and Ball 2 carries ½ · 2 · 6.93² ≈ 48.00 J, summing back to 64.00 J. The simulator's KE readout holds at 64.00 J across the collision; any drop would mark the collision as inelastic, which is the experimental fingerprint that distinguishes the two regimes.
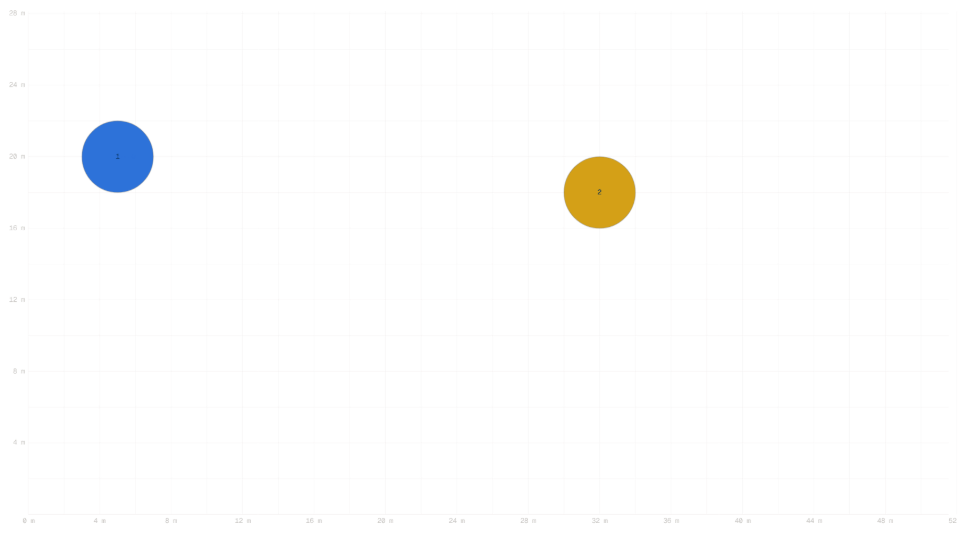
The clean way to apply both conservation laws at once is to work in the contact-normal frame. The contact normal is the line joining the two centres at the moment they touch. With the approach angle slider at 30°, Ball 2 is offset sideways from Ball 1's path by R·sin θ = 2 m, and the geometry of two 2 m radii touching at distance R_SUM = 4 m gives a normal tilted exactly 30° below horizontal. Each velocity is split into a normal component along that line and a tangential component perpendicular to it.
Along the normal, the problem collapses to an ordinary 1D elastic collision. For equal masses with one target at rest, the normal component transfers entirely from Ball 1 to Ball 2, and Ball 1's normal component drops to zero. The tangential components are untouched by the frictionless impact, so Ball 1 keeps v₁·sin 30° = 4.00 m/s tangent to the contact line and Ball 2 leaves carrying v₁·cos 30° ≈ 6.93 m/s along the normal. The simulator's v₁ and v₂ readouts confirm 4.00 m/s and 6.93 m/s, and θ₁ after lands on 60.0°, which is exactly 90° from Ball 2's −30° emergence direction.
Key Equations
For the default setup, the left side is 2 · 8 + 2 · 0 = 16.000 kg·m/s. After the collision, Ball 1 contributes 2 · 4.00·cos 60° = 4.000 and Ball 2 contributes 2 · 6.93·cos(−30°) ≈ 12.000, summing to 16.000 kg·m/s, matching the simulator's p readout exactly.
The initial y-momentum is zero because both initial velocities lie along the x-axis. After impact, Ball 1 contributes 2 · 4.00·sin 60° ≈ +6.93 and Ball 2 contributes 2 · 6.93·sin(−30°) ≈ −6.93, cancelling to zero; the perpendicular kicks balance, exactly as required.
Initial KE = ½ · 2 · 64 + 0 = 64.00 J. Final KE = ½ · 2 · 4.00² + ½ · 2 · 6.93² = 16.00 + 48.00 = 64.00 J. The simulator's KE readout never leaves 64.00 J, which is the experimental hallmark of the elastic regime.
With equal masses and Ball 2 at rest, v₁ₙ' = (0 · v₁ₙ + 0) / (2·m) = 0. The full normal component of Ball 1 transfers to Ball 2; Ball 1 keeps only its tangential 4.00 m/s and emerges at 60° above the contact normal.
For equal masses with v₂ₙ = 0, this reduces to v₂ₙ' = v₁ₙ = v₁·cos 30° ≈ 6.93 m/s. The simulator's v₂ readout settles at 6.93 m/s after the impact, and Ball 2 travels along the contact normal at −30° below horizontal.
Ball 1's tangential component is v₁·sin 30° = 4.00 m/s and survives the impact untouched. Ball 2 had no tangential component to start with, so its post-collision tangential is also zero: the entire 6.93 m/s lies along the normal direction.
Key Variables
| Symbol | Name | Unit | Meaning |
|---|---|---|---|
| m₁, m₂ | Ball masses | kg | Inertial mass of each colliding sphere |
| v₁, v₂ | Speeds | m/s | Magnitude of each ball's velocity vector |
| θ | Approach angle | ° | Sideways offset of Ball 2 from Ball 1's path |
| θ₁ after | Post-collision angle | ° | Angle of Ball 1's outgoing velocity |
| p | Total momentum | kg·m/s | Vector sum of both balls' momenta |
| KE | Total kinetic energy | J | Sum of ½m·v² for both balls |
Real World Examples
Why does a cue ball stop dead on a centre-line break?
A pool player who strikes a stationary target ball squarely with the cue ball watches the cue ball halt while the target rockets away at the cue's original speed. The two balls have nearly equal mass, the impact is nearly elastic, and the cut angle is zero, so along the contact normal the entire velocity transfers from striker to target, exactly as the equal-mass exchange rule predicts. Any forward roll the cue retains comes from spin, not from translational momentum.
The simulator reproduces this limit with the approach angle slider at 0°, both masses at 2.0 kg, and Ball 1 speed 8.0 m/s. The v₁ readout drops to 0.00 m/s and v₂ jumps to 8.00 m/s; total momentum stays at 16.000 kg·m/s and KE stays at 64.00 J, with one ball perfectly substituted for the other. Sliding the approach angle off zero immediately splits the energy between the two balls, and the cue ball regains the deflection that pool players rely on for position play.
The 90°-separation rule that emerges at any non-zero approach angle is the same fact a snooker coach drills as the half-ball aiming line. With both balls the same mass and the target at rest, the cue's outgoing path is always perpendicular to the target's, so the player can plan two shots from one impact: where the target ball is going and where the cue is leaving. The simulator's θ₁ after readout traces this rule for every angle, sitting at 60° when the approach angle is 30° and falling toward 90° as the impact becomes more glancing.
How did Rutherford deduce the atomic nucleus from scattering angles?
In 1909 Geiger and Marsden fired alpha particles at a thin gold foil and counted how many bounced back at large angles. Rutherford modelled each alpha–nucleus encounter as an elastic 2D collision under the Coulomb force and discovered that the angular distribution required the gold's positive charge to be packed into a region orders of magnitude smaller than the atom itself. The 90° rule does not apply here because the alpha and the gold nucleus are wildly unequal in mass, but the same momentum-and-energy bookkeeping is what links the measured scattering angle to the impact parameter.
The simulator illustrates the unequal-mass limit clearly. Setting Ball 1 mass to 1.0 kg, Ball 2 mass to 8.0 kg, Ball 1 speed 8.0 m/s, and approach angle 0°, the v₁ readout shows Ball 1 rebounding backward (θ₁ after lands near 180°) while the heavy Ball 2 barely budges. That is the scattering geometry Rutherford saw: a light projectile recoiling almost straight back from a much heavier centre, evidence that something concentrated and massive sat at the heart of each gold atom.
Does an air-hockey puck obey the same equations as a billiard ball?
Air-hockey pucks slide on a near-frictionless cushion of air, so their planar collisions sit close to the elastic 2D ideal. When two pucks of equal mass strike off-centre, players see exactly the perpendicular outgoing paths the equal-mass elastic rule predicts, and competitive doubles strategy is built on directing rebounds at the 90° angle the geometry guarantees. Unlike billiards, there is almost no spin to complicate the picture, so the prediction lines up even tighter.
The simulator confirms the rule across the full range of glancing impacts. Holding both masses at 2.0 kg and Ball 1 speed at 8.0 m/s while sweeping the approach angle from 0° through 15°, 30°, 45°, 60°, and 75° gives θ₁ after readouts that track 90° minus the approach angle every time (90°, 75°, 60°, 45°, 30°, 15°), so the angle between the outgoing paths stays pinned at 90°. The result is geometric, not dynamical: changing Ball 1's incoming speed from 4 m/s to 15 m/s leaves θ₁ after unchanged, because both conservation laws are homogeneous in velocity.
Further Reading
- Elastic collisions in one dimension: the head-on case, where the same normal-component exchange happens along a single axis.
- Inelastic collisions: what changes when kinetic energy is lost to deformation, sound, or heat instead of being conserved.
- Foot-on-ball impact: an everyday application of the same momentum-and-energy bookkeeping to sport-scale collisions.